


9 USV | Make Sense Out of Mars
Team Updates
Data Reference:
1) https://marsmobile.jpl.nasa.gov/msl/mission/instru...
2) https://mars.nasa.gov/weather/storm-watch-2018/
3) https://www.nasa.gov/mission_pages/msl/multimedia/...
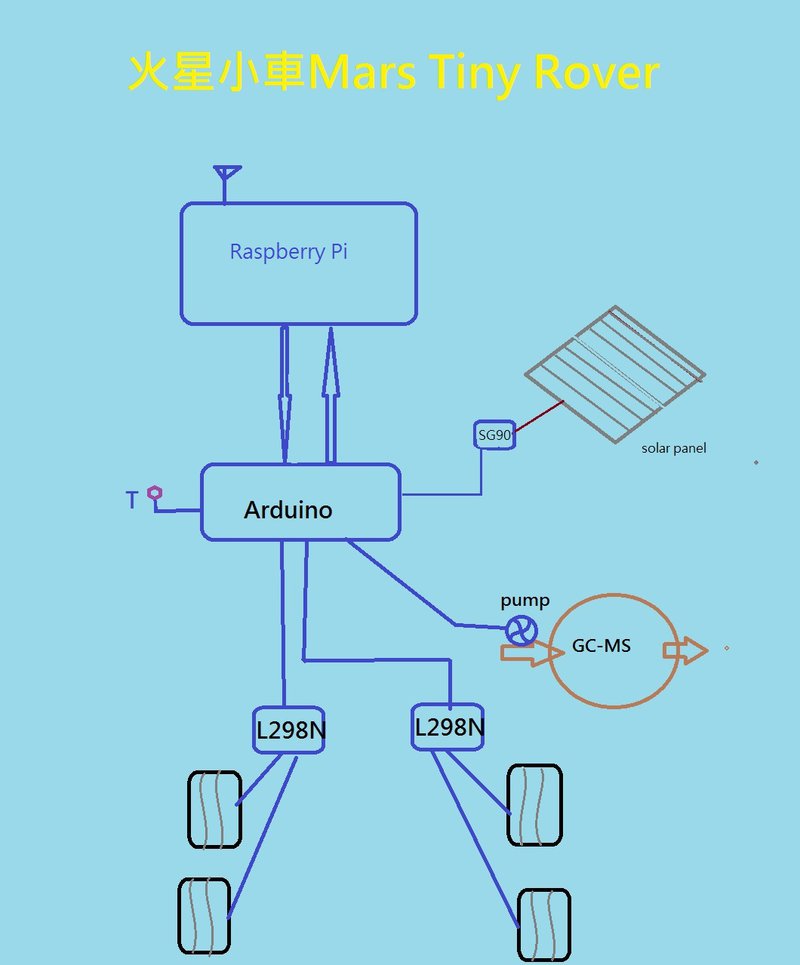
Mars Tiny Rover
/ connect motor pins to Arduino pins// motor 1int enA = 10;int in1 = 9;int in2 = 8;// motor 2int enB = 5;int in3 = 7;int in4 = 6;void setup(){ // set all the motor control pins to outputs pinMode(enA, OUTPUT); pinMode(enB, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT);}void demoOne(){ // this function will run the motors in both fixed speed // turn on motor A digitalWrite(in1, HIGH); digitalWrite(in2, LOW); // set speed to 200 out of possible range 0~255 analogWrite(enA, 200); // turn on motor B digitalWrite(in3, HIGH); digitalWrite(in4, LOW); // set speed to 200 out of possible range 0~255 analogWrite(enB, 200); delay(2000); // now change motor directions digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(2000); // now turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW);}void demoTwo(){ // this function will run the motors across the range of possible speeds // maximum speed is determined by the motor itself and the operating voltage // the PWM values sent by analogWrite() are fractions of the maximum speed possible // your hardware // on motors digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); // accelerate from zero to maximum speed for (int i = 0; i < 256; i++) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // decelerate from maximum speed to zero for (int i = 255; i >= 0; --i) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // now turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); }void loop(){ demoOne(); delay(1000); demoTwo(); delay(1000);}
Mars tiny rover

SpaceApps is a NASA incubator innovation program.