


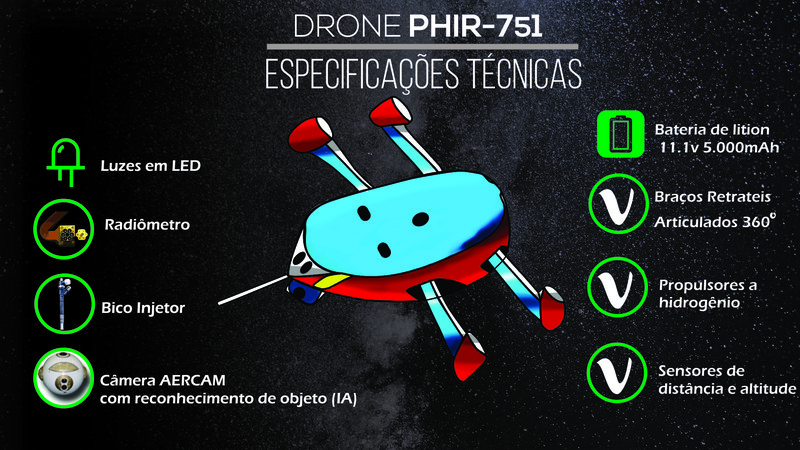
Colibri5PACE | Design by Nature
Team Updates



Inspection surface: Cone-shaped inspection surface geometry; distance of free-flyer from inspection surface
By hypothetical means, we did some calculations where our intention was to find the coverage area of the inspection surface, quoted in the considerations of this challenge, whose understanding, which was asked, was to explain how far the Drone would need to be inspecting a certain area, whose radius would be X meters, to explain more clearly we create a situation and justify what was requested.
Suppose the spacecraft is reached by Micro-Meteoroid and Orbital Debris (MMOD) for which a hole has been opened in its fuselage, which distance the Drone must be in order to be able to inspect an area with the radius of 6 cm and the measurement of the lateral area is 10 cm
Resolution:
g = √r2 + h2
10 = √62 + h2
10 = √36 + h2
h2 = 10 - 6
h2 = 4
h= 8 cm
At a distance of 8 cm the Drone can inspect and with a good precision
Superfície de inspeção: Geometria da superfície de inspeção em forma de cone; distância do free-flyer da superfície de inspeção
Por meio hipotético fizemos alguns cálculos onde nossa intenção foi encontrar a área de abrangência da superfície de inspeção, citada nas considerações deste desafio,a qual o nosso entendimento, o que foi pedido foi para explicar a qual distância o Drone precisaria estar para inspecionar uma determinada área, cujo raio fosse X metros, sendo assim para explicarmos de forma mais clara criamos uma situação e justificamos o que foi pedido.
Suponhamos que a espaçonave seja atingida por Micro-Meteoróide e Detritos Orbitais (MMOD) ao qual foi aberto um orifício na sua fuselagem, a qual distância o Drone deve estar para poder inspecionar uma área com o raio de 6 cm e a medida da área lateral é de 10 cm?
Resolução:
g = √r2 + h2
10 = √62 + h2
10 = √36 + h2
h2 = 10 - 6
h2 = 4
h= 8 cm
A uma distância de 8 cm o Drone pode inspecionar e com uma boa precisão.
| #include <stdio.h> | |
| #include<stdlib.h> | |
| #include <stdbool.h> | |
| #include <conio.h> | |
| #include <locale.h> | |
| #define EIXO_X 2 | |
| #define EIXO_Y 2 | |
| // Declaração de variáveis | |
| int map_area [EIXO_X][EIXO_Y]; | |
| int default_area [EIXO_X][EIXO_Y]; | |
| int main(){ | |
| setlocale(LC_ALL, "Portuguese"); | |
| printf("============================================\n"); | |
| printf("= CÓDIGO DRONE PHIR =\n"); | |
| printf("============================================\n"); | |
| printf("\n\nCódigo verificador de anomalias em partes externas da nave espacial. \n"); | |
| // Caracteristica padrão da nave, obtendo valores automaticos. | |
| for(int x=0;x<EIXO_X;x++){ | |
| for(int y=0;y<EIXO_Y;y++){ | |
| default_area[EIXO_X][EIXO_Y]=1; | |
| } | |
| } | |
| printf("Captando dados de rastreio da nave\n"); | |
| // Captação realizada atraves das coordenadas em relação a nave (GPS). | |
| for(int x=0;x<EIXO_X;x++){ | |
| for(int y=0;y<EIXO_Y;y++){ | |
| printf("EIXO_X / Y %d , %d ", x,y ); | |
| // O sensor óptico insere no banco de dados registros de anomalias | |
| scanf("%d",&map_area[x][y]); | |
| printf("\n"); | |
| } | |
| } | |
| // Comparação de dados com tomada de decisão. | |
| for(int x=0;x<EIXO_X;x++){ | |
| for(int y=0;y<EIXO_Y;y++){ | |
| for(int i=0;i<EIXO_X;i++){ | |
| for(int j=0;j<EIXO_Y;j++){ | |
| if(default_area[EIXO_X][EIXO_Y]!=map_area[EIXO_X][EIXO_Y]){ | |
| printf("DIFERENTE %d, %d \n",default_area[x][y],map_area[x][y]); | |
| } | |
| } | |
| } | |
| } | |
| } | |
| system("pause"); | |
| } |

SpaceApps is a NASA incubator innovation program.