


The Challenge | Mission to the Moon!
LuTractor
Rover mission aims to establish landing sites for further Moon exploration
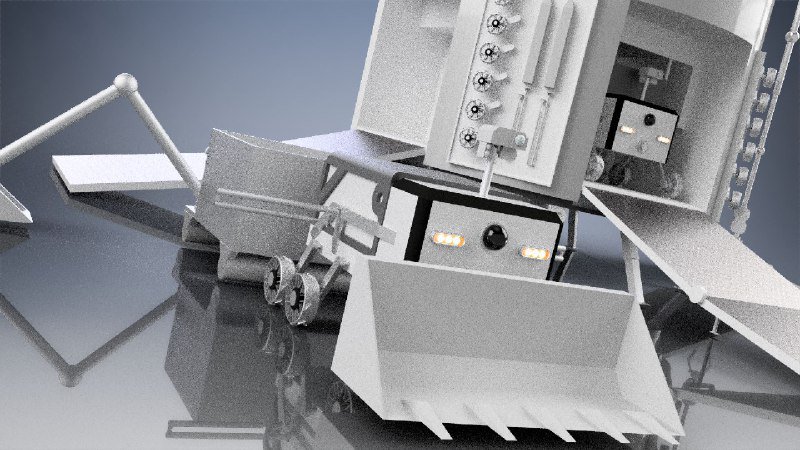
The lunar module is designed to prepare the landing site on the lunar surface - a place for formation of the lunar base. The main element of the system is the landing module, on board which contains:
- Rover
- 3 replaceable batteries
- Tools for work, which are cart with digger and rollers,
- excavator bucket
- drill
- jackhammer
Solar panel is also located on board of landing module, which will serve as a source of energy. Built-in high-capacity integrated batteries will be used to provide operations during the lunar night. Removable batteries can be replaced on board of the lunar base. This scheme will provide constant work of the rover. In case of any accident, there are two manipulators on board of the base, with will repair components or tools by using spare parts. In order to increase the speed of surface leveling two more rovers can be delivered later. To ensure the stable operation of the power system, a module with a radioisotope thermoelectric generator will also be delivered. During the surface leveling unused rocks will remain. Leaving such material unused would be irrational; a module for creating stone plates can be delivered later. These rock plates have physical properties similar to aluminum alloys. We can use the plates to create a solid platform which will be used as stand for lunar base.
We have concept of communication which contain three independent channels of data transmission.
Earth-Base, Base-Rover, Rover-Earth
Earth stores all data( information about moon surface, base and rover status(all actions), base stores information about workspace + full data log, rover - full dynamic map of the workspace .
Communication channel Rover-Earth - emergency and and slower than Earth-Base which necessary to maintain connection with earth when we lost connection with the base.
When we lose connection between Earth and Base rover will be repeater for Earth and Base. Also when we lose connection Rover-Base Earth we be repeater.
For orientation in space, we use three-dimensional space, where base is a reference point of coordinates. For global location determination we use connection with the base, or if we need more detailed location determination - using cameras and Lidar. For scanning rover using Lidar and cameras, then by means of libraries with open source code like OpenCv, after that create multidimensional database which contain сoordinate system and information about terrain, then by triangulation points of the array reorganise into 3D-model and
divide by isolines into layers for more efficient mapping and data processing. As a result we have 3D-model of the workspace with area markup for specific tools
Algorithm of leveling terrain provide when the height difference max and min layers will be less than specified error rover should check necessary in using specific tools, transport removed layer into min layer, then refresh 3D-model of the terrain.

SpaceApps is a NASA incubator innovation program.