


ExTRAVS | Mission to the Moon!
The Challenge | Mission to the Moon!
Extraterrestrial Rover Applied Visual Simulator or- ExTRAVS
ExTRAVS is a virtual lunar and rover simulator in which scientists, engineers, and project managers use to better understand, explain, and perform cost analysis on lunar mission planning from their perspective.
ExTRAVS- Extraterrestrial Rover Applied Visual Simulator
Competing at the Professional Level
Introduction
This was a project derived for the response to the “Mission to the Moon!” challenge. A combination of the traveling salesman approach and suitability surface modeling was taken to help NASA principle investigators find lunar rover landing sites and visually understand what potential necessities will be needed during their missions.Ever have the problem thinking about a project with a different perspective?Visualizing or simulating the project helps figure out solutions. ExTRAVS was created to input real data and hypothetical data in this learning environment to visually see potential failures and successes in the mission.
Background
The Moon—a symbol as a stepping stone to space exploration. Since 2008, the NASA Lunar Science Institute was formed to help lead NASA's research activities related to lunar exploration goals. Since then, several orbital missions have been conducted to understand the moon further, the goal to send more rovers, both unmanned and manned. When creating missions of potential locations for lunar landings and figuring out the scientific and engineering considerations for research opportunities to these sites, a costs analysis needs to be conducted.
Ever have the problem thinking about a project with a different perspective? At times some NASA researchers and project managers might come across the same problem. Visualizing or simulating the project helps figure out solutions to the most out-of-this world problems.
The Extraterrestrial Rover Applied Visual Simulator or- ExTRAVS- is a virtual environment which scientist, engineers, researchers, and project managers can use to better understand and explain their mission goals. This working environment fully encompasses the utility of Science, Technology, Engineering, Art, and Mathematics—STEAM. ExTRAVS’ mission is to help researchers and developers utilize STEAM to fully encompass every perspective when creating mission decisions regarding the lunar rover and experiencing failures and successes themselves. By virtually simulating their goals and finding the cost analysis on different research locations on the moon, everyone in this lunar excavation can display and understand the problems they might face when developing the next lunar rover mission.
ExTRAVS leverages real data derived from different lunar missions such as the Lunar Reconnaissance Orbiter (LRO), Gravity Recovery and Interior Laboratory (GRAIL), and Lunar Atmosphere and Dust Environment Explorer (LADEE) and implements it to perform a cost analysis. By layering data such as the battery life of the rover, digital elevation data, composition of the lunar surface, thermal measurements, identified regions that may harbor water and hydrogen, and measurements of the moon's gravitational field to the virtual surface simulator—the principle investigator can determine the best landing locations and payloads for the rover.
The ExTRAVS user can navigate through the simulation and get firsthand experience on how the mission would occur and see how they can train the autonomous rover to conduct mission tasks and evaluate how problems can occur both scientifically and mechanically.
Using ExTRAVS you can a determine the cost analysis of the rover’s mission and conduct several scenarios to see how payload missions would play out. In this simulator different way points were selected such as locations to set up research sites for a variety of instrumentation collection such as the heat flow analysis within the Moon’s interior, solar wind and atmosphere recording, dust detection tools, seismic reading collection and energy stations for the rover such as solar panel installation.
When it comes to this mission… NASA is known for thinking both outside, inside, AND even through the box. ExTRAVS can help NASA continue on FULL STEAM AHEAD.
Technical Solution Description
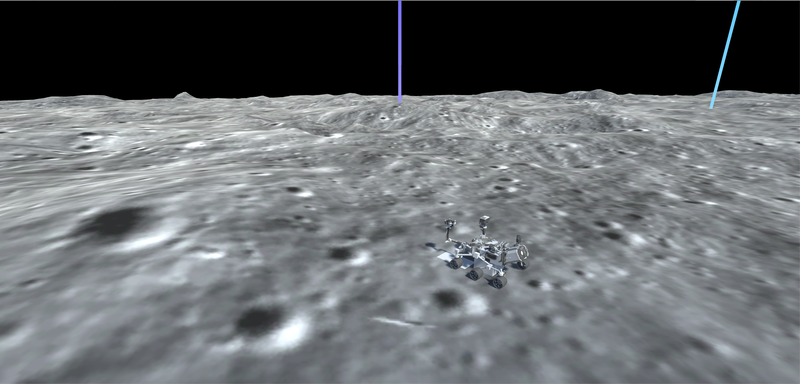
We created a proof of concept moon rover exploration game using the Unity game engine. The 3D model of the Curiosity rover came from NASA, and the digital elevation model used to create the 3D terrain model came from NASA Moon Trek data for the area around the Apollo 16 landing site. Unity’s built in physics model was used, but gravity was set to approximately one-sixth of Earth’s gravity. We also had to create a physics model of the rover to accurately model how the rover will interact with the lunar surface.
The game currently allows the user to drive a rover on the moon’s surface; waypoints, with their distance from the rover, are visible to guide the user to areas of interest. Multiple camera angles are also visible to better plan a route. A battery indicator bar is included on the heads up display and decreases as the rover moves.
Challenges
There was slight difficulty in obtaining and processing the appropriate data such as the digital elevation model for the Lunar surface using Moon TREK but another solution was found in order to implement real data to our simulation.
Creating 3D games is challenging and time consuming; something that seems simple can take hours of searching through forum posts and trail and error.
Outlook
Future development of this virtual simulator would include additional datasets provided by NASA. This can include scientific datasets derived from past and current lunar missions, engineering components from current lunar rover plans, and prospected locations for the landing of the manned and unmanned rovers.
Team Composition
Team ExTRAVS is composed of a variety of people with different backgrounds: Information Systems, Computer Engineering, Computer Science, and Earth System Science. Each of the team members participated in several ways from design on the game, NASA data collection, perspective design, and video editing. We all enjoyed participating in the Space Apps Challenge 2018 Hack-a-thon. We would like to thank Urban Engine and NASA and everyone who in Huntsville, Alabama that helped and supported our endeavor.
Links:
NASA Videos Credit:
- Moonlight (Clair de Lune) 4K Version - Moon Images from Lunar Reconnaissance Orbiter: http://svs.gsfc.nasa.gov/4655
- NASA | LRO Observes the LCROSS Impact: http://svs.gsfc.nasa.gov/10686
Project Link:
https://github.com/gMitchell09/ExTRAVS
Rover 3D model:
https://github.com/nasa/NASA-3D-Resources/tree/master/3D%20Models/Curiosity%20(Clean)
NASA Moon TREK DEM:

SpaceApps is a NASA incubator innovation program.