


ABLab | Artify the Earth
Team Updates

In space!!
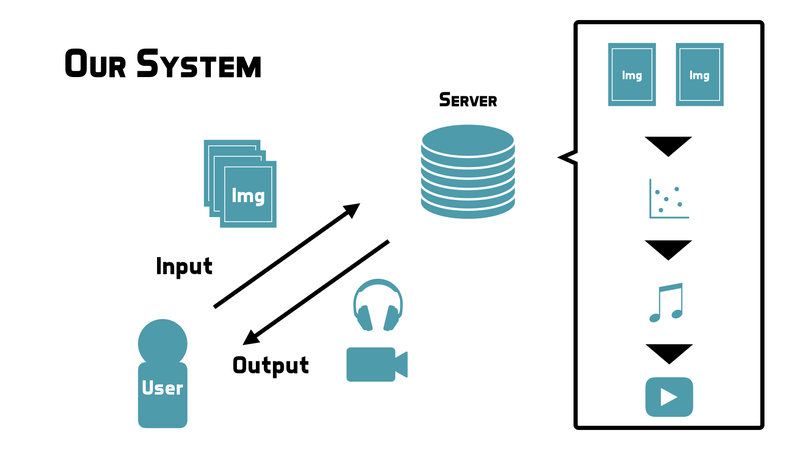
Our Systems
| #!/usr/bin/env python | |
| """max-osc-python.py : demonstration of a service node communicating parameters and data with Max via OSC messaging. | |
| Copyright (c) 2014-2017, Garth Zeglin. All rights reserved. Provided under the | |
| terms of the BSD 3-clause license. | |
| This uses txosc and Twisted to send and receive OSC messages. | |
| """ | |
| # references: | |
| # https://docs.scipy.org/doc/numpy/ | |
| # https://bitbucket.org/arjan/txosc/wiki/Home | |
| # https://twistedmatrix.com/trac/wiki/Documentation | |
| # standard Python modules | |
| from __future__ importprint_function | |
| importtime, argparse, random | |
| # NumPy system for numeric and matrix computation | |
| importnumpyasnp | |
| # Twisted networking framework | |
| importtwisted.internet.reactor | |
| importtwisted.internet.task | |
| importtwisted.internet.protocol | |
| # TxOSC OpenSoundControl library | |
| importtxosc.osc | |
| importtxosc.dispatch | |
| importtxosc.async | |
| fromPILimportImage, ImageFilter, ImageChops | |
| importnumpyasnp | |
| importcv2 | |
| importmatplotlib.pyplotasplt | |
| importtime | |
| importos.path | |
| ############ | |
| #----- Parameters ------ | |
| N_image1=5 | |
| N_image2=np.arange(0, N_image1, 1) # [0,1,2] num of images | |
| N_image3=np.arange(0, N_image1-1, 1) # [0,1] num of diff | |
| plot=1# 1: plot on, 0: plot off | |
| #----------------------- | |
| #---------------------------------------------- | |
| ifos.path.exists("./output2.txt"): | |
| print ("output2.txt exists") | |
| ifnotos.path.exists("./output2.txt"): | |
| print("\n-----------------------------------") | |
| print("image loading....") | |
| img_pixels= [] | |
| foriinN_image2: | |
| str= ("%d"%i) | |
| print("alos_"+str+".jpg") | |
| img=Image.open("alos_"+str+".jpg") | |
| grey_img=img.convert('L') | |
| width, height=grey_img.size | |
| print ("width, height =", width, height) | |
| img_pixels.append(np.array([[grey_img.getpixel((j,m)) forjinrange(width)] forminrange(height)])) | |
| #plt.imshow(img_pixels[i]) | |
| #plt.show() | |
| foriinN_image2: | |
| print("---img", i) | |
| print(img_pixels[i]) | |
| #---------------------------------------------- | |
| print("\n-----------------------------------") | |
| print("image subtracting....") | |
| sub= [] | |
| foriinN_image3: | |
| sub.append(img_pixels[i+1] -img_pixels[i]) | |
| foriinN_image3: | |
| print("---sub", i) | |
| print(sub[i]) | |
| #---------------------------------------------- | |
| print("\n-----------------------------------") | |
| print("Finding out significantly changes....") | |
| sub_data2= [] | |
| sum= [] | |
| ave= [] | |
| N_pixels=height*width | |
| print ("N_pixels =", N_pixels) | |
| print ("width, height =", width, height) | |
| foriinN_image3: | |
| sub_data1= [] # initialize | |
| print ("subbbbb", i) | |
| sum.append(np.sum(sub[i])) | |
| ave.append(np.average(sub[i])) | |
| foryinrange(0,height): | |
| forxinrange(0,width): | |
| #print (sub[i][y][x]) | |
| sub_data1.append(sub[i][y][x]) | |
| #print(sub_data1) | |
| sub_data2.append(sub_data1) | |
| sigma= [] | |
| foriinN_image3: | |
| sigma2=0# initialize | |
| forninrange(0,N_pixels): | |
| sigma2+=np.power(sub_data2[i][n]-ave[i], 2) | |
| sigma.append(np.power(sigma2/N_pixels, 0.5)) | |
| foriinN_image3: | |
| print ("---sub", i) | |
| print ("sum =", sum[i]) | |
| print ("ave =", ave[i]) | |
| print ("sigma = %.5e"%sigma[i]) | |
| #print (sub_data2[i]) | |
| # brighter (red) | |
| x_b2, y_b2, sub_b2= [], [], [] | |
| sound_b2, count_b2= [], [] | |
| max_x_b2, max_y_b2= [], [] | |
| foriinN_image3: | |
| x_b1= [] #initialize | |
| y_b1= [] #initialize | |
| sub_b1= [] #initialize | |
| sound_b1=0#initialize | |
| count_b1=0#initialize | |
| maxim=0 | |
| max_x_b1=0 | |
| max_y_b1=0 | |
| foryinrange(0,height): | |
| forxinrange(0,width): | |
| if (sub[i][y][x] >=ave[i] +3*sigma[i]): | |
| ifsub[i][y][x] >=maxim: | |
| maxim=sub[i][y][x] | |
| max_x_b1=x | |
| max_y_b1=y | |
| x_b1.append(x) | |
| y_b1.append(y) | |
| sub_b1.append(sub[i][y][x]) | |
| sound_b1+=sub[i][y][x] | |
| count_b1+=1 | |
| x_b2.append(x_b1) | |
| y_b2.append(y_b1) | |
| sub_b2.append(sub_b1) | |
| sound_b2.append(sound_b1) | |
| count_b2.append(count_b1) | |
| max_x_b2.append(max_x_b1) | |
| max_y_b2.append(max_y_b1) | |
| #print (max(sub_b2)) | |
| # darker (blue) | |
| x_d2, y_d2, sub_d2= [], [], [] | |
| sound_d2, count_d2= [], [] | |
| max_x_d2, max_y_d2= [], [] | |
| foriinN_image3: | |
| x_d1= [] #initialize | |
| y_d1= [] #initialize | |
| sub_d1= [] #initialize | |
| sound_d1=0#initialize | |
| count_d1=0#initialize | |
| maxim=0 | |
| foryinrange(0,height): | |
| forxinrange(0,width): | |
| if (sub[i][y][x] <=ave[i] -3*sigma[i]): | |
| if-sub[i][y][x] >=maxim: | |
| maxim=-sub[i][y][x] | |
| max_x_d1=x | |
| max_y_d1=y | |
| x_d1.append(x) | |
| y_d1.append(y) | |
| sub_d1.append(sub[i][y][x]) | |
| sound_d1+=-sub[i][y][x] | |
| count_d1+=1 | |
| x_d2.append(x_d1) | |
| y_d2.append(y_d1) | |
| sub_d2.append(sub_d1) | |
| sound_d2.append(sound_d1) | |
| count_d2.append(count_d1) | |
| max_x_d2.append(max_x_d1) | |
| max_y_d2.append(max_y_d1) | |
| #---------------------------------------------- | |
| f1=open('output.txt', 'w') | |
| # bright | |
| print("\n-----------------------------------") | |
| print("Converting to sounds (1)....") | |
| delta_sound_b=max(sound_b2)-min(sound_b2)+1e-10# prevent dividing by 0 | |
| print(delta_sound_b) | |
| delta_count_b=max(count_b2)-min(count_b2)+1e-10 | |
| delta_max_x_b=max(max_x_b2)-min(max_x_b2)+1e-10 | |
| delta_max_y_b=max(max_y_b2)-min(max_y_b2)+1e-10 | |
| Norm_sound_b, Norm_count_b= [], [] | |
| max_x_b, max_y_b= [], [] | |
| foriinN_image3: | |
| Norm_sound_b.append((sound_b2[i] -min(sound_b2))/delta_sound_b) | |
| Norm_count_b.append((count_b2[i] -min(count_b2))/delta_count_b) | |
| max_x_b.append((max_x_b2[i] -min(max_x_b2))/delta_max_x_b) | |
| max_y_b.append((max_y_b2[i] -min(max_y_b2))/delta_max_y_b) | |
| foriinN_image3: | |
| print ("---sub", i) | |
| print ("sound", sound_b2[i]) | |
| print ("count", count_b2[i]) | |
| print ("Normalized sound = %.2f"%Norm_sound_b[i]) | |
| print ("Normalized count = %.2f"%Norm_count_b[i]) | |
| # dark | |
| print("\n-----------------------------------") | |
| print("Converting to sounds (2)....") | |
| delta_sound_d=max(sound_d2)-min(sound_d2)+1e-10 | |
| delta_count_d=max(count_d2)-min(count_d2)+1e-10 | |
| delta_max_x_d=max(max_x_d2)-min(max_x_d2)+1e-10 | |
| delta_max_y_d=max(max_y_d2)-min(max_y_d2)+1e-10 | |
| Norm_sound_d, Norm_count_d= [], [] | |
| max_x_d, max_y_d= [], [] | |
| foriinN_image3: | |
| Norm_sound_d.append((sound_d2[i] -min(sound_d2))/delta_sound_d) | |
| Norm_count_d.append((count_d2[i] -min(count_d2))/delta_count_d) | |
| max_x_d.append((max_x_d2[i] -min(max_x_d2))/delta_max_x_d) | |
| max_y_d.append((max_y_d2[i] -min(max_y_d2))/delta_max_y_d) | |
| list= [] | |
| foriinN_image3: | |
| print ("---sub", i) | |
| print ("sound", sound_d2[i]) | |
| print ("count", count_d2[i]) | |
| print ("Normalized sound = %.2f"%Norm_sound_d[i]) | |
| print ("Normalized count = %.2f"%Norm_count_d[i]) | |
| NSB= ("%.3f"%Norm_sound_b[i]) | |
| NCB= ("%.3f"%Norm_count_b[i]) | |
| NSD= ("%.3f"%Norm_sound_d[i]) | |
| NCD= ("%.3f"%Norm_count_d[i]) | |
| #print(NSB, NCB, NSD, NCD) | |
| str='%.3f %.3f %.3f %.3f %.3f %.3f %.3f %.3f\n'% (abs(Norm_sound_b[i]), abs(Norm_count_b[i]), abs(Norm_sound_d[i]), abs(Norm_count_d[i]), max_x_b[i], max_y_b[i], max_x_d[i], max_y_d[i]) | |
| f1.write(str) | |
| f1.close() | |
| #----- Plotting ------- | |
| ifplot==1: | |
| foriinN_image3: | |
| plt.imshow(sub[i]) | |
| #plt.imshow(img_pixels[i]) | |
| CB=plt.colorbar() | |
| CB.formatter.set_scientific(True) | |
| CB.formatter.set_powerlimits((0,0)) | |
| CB.update_ticks() | |
| #CB.ax.ticklabel_format(style='sci', scilimits=(0,0)) | |
| CB.set_label('color bar') | |
| plt.title("Difference") | |
| #plt.xlabel("RA. [pixel]") | |
| #plt.ylabel("DEC. [pixel]") | |
| plt.plot(x_d2[i], y_d2[i], 'bo', markersize=3) | |
| plt.plot(x_b2[i], y_b2[i], 'ro', markersize=3) | |
| #plt.xlim([-0.5,width-0.5]) | |
| plt.show() | |
| #----------------------- | |
| # print("x_b2, y_b2") | |
| # print(x_b2, y_b2) | |
| # print("x_d2, y_d2") | |
| # print(x_d2, y_d2) | |
| ############# | |
| #----- Plotting ------- | |
| arr=np.loadtxt("output.txt", delimiter=" ", dtype="float") | |
| arrT=np.array(arr.T) | |
| print(arr.T) | |
| np.savetxt('output2.txt', arr.T, fmt='%.3f') | |
| base_time=time.time() | |
| # The associated Max patcher assumes that the Python node sends and receives using the following UDP port numbers: | |
| PYTHON_NODE_RECV_PORT=12001 | |
| PYTHON_NODE_SEND_PORT=12000 | |
| ################################################################ | |
| classOscServer(object): | |
| """The OscServer class holds all the application state: communication ports, | |
| message callback assignments, and dynamic parameters.""" | |
| def__init__(self, recv_port=PYTHON_NODE_RECV_PORT, send_port=PYTHON_NODE_SEND_PORT, verbose=False): | |
| self.verbose=verbose | |
| self.recv_portnum=recv_port | |
| self.send_portnum=send_port | |
| self._reactor=None | |
| self._ping_count=0 | |
| # set default generator parameters | |
| self._reset_parameters() | |
| return | |
| def_reset_parameters(self): | |
| self._xfreq=1 | |
| self._yfreq=1 | |
| self._xphase=0.0 | |
| self._yphase=0.0 | |
| deflisten( self, reactor ): | |
| """The listen method is called to establish the UDP ports to receive and send OSC messages.""" | |
| self._reactor=reactor | |
| self.receiver=txosc.dispatch.Receiver() | |
| self._server_protocol=txosc.async.DatagramServerProtocol(self.receiver) | |
| self._server_port=reactor.listenUDP(self.recv_portnum, self._server_protocol, maxPacketSize=60000) | |
| ifself.verbose: print( "Listening on osc.udp://localhost:%s", self.recv_portnum ) | |
| self._client_protocol=txosc.async.DatagramClientProtocol() | |
| self._client_port=reactor.listenUDP(0, self._client_protocol, maxPacketSize=60000) | |
| ifself.verbose: print( "Ready to send using %s"%self._client_port) | |
| # Set up the OSC message handling system. As a convention for | |
| # legibility, the message callback methods have msg_ prepended to the | |
| # message, but this is not required. | |
| # Assign methods to receive messages intended for debugging the system. | |
| self.receiver.addCallback( "/reset", self.msg_reset ) | |
| self.receiver.addCallback( "/quit", self.msg_quit ) | |
| self.receiver.addCallback( "/ping", self.msg_ping ) | |
| # Assign methods to receive parameter control messages. | |
| self.receiver.addCallback( "/xfreq", self.msg_xfreq) | |
| self.receiver.addCallback( "/yfreq", self.msg_yfreq) | |
| # Assign methods to receive other event functions. | |
| self.receiver.addCallback( "/nextframe", self.msg_nextframe) | |
| # Assign a default function to receive any other OSC message. | |
| self.receiver.fallback=self.msg_fallback | |
| return | |
| #### Message handlers. ############################################ | |
| # Define a default handler for any unmatched message address. | |
| defmsg_fallback(self, message, address): | |
| print("Received OSC message with unhandled address '%s' from %s: %s"% (message.address, address, message.getValues())) | |
| return | |
| defmsg_reset( self, message, address): | |
| ifself.verbose: print("Receive reset request.") | |
| self._reset_parameters() | |
| return | |
| defmsg_quit( self, message, address): | |
| ifself.verbose: print( "Received quit request, shutting down." ) | |
| self._reactor.stop() | |
| defmsg_ping( self, message, address): | |
| ifself.verbose: print("Received ping request.") | |
| # reply to the IP address from which the message was received | |
| send_host=address[0] | |
| self._ping_count+=1 | |
| self._client_protocol.send( txosc.osc.Message("/pong", self._ping_count), (send_host, self.send_portnum)) | |
| return | |
| defmsg_xfreq( self, message, address): | |
| self._xfreq=message.getValues()[0] | |
| ifself.verbose: print("xfreq now %s"%self._xfreq) | |
| return | |
| defmsg_yfreq( self, message, address): | |
| self._yfreq=message.getValues()[0] | |
| ifself.verbose: print("yfreq now %s"%self._yfreq) | |
| return | |
| defmsg_nextframe( self, message, address): | |
| #----parameters---- | |
| N_variance=8 | |
| music_length=10#sec | |
| freq=1#sec | |
| #------------------ | |
| ifself.verbose: print("Generating next frame.") | |
| # create a two-channel trajectory signal as a 2xN array | |
| cols=N_variance | |
| rows=1# output each row in order | |
| trajectory=np.ndarray((rows, cols), dtype=np.float32) | |
| # create index array for calculating functions | |
| #tt = np.linspace(0.0, 1.0, cols, dtype=np.float32) | |
| data_x=np.loadtxt("output2.txt", comments="#", delimiter=' ') | |
| # compute two sets of trajectory samples | |
| #print(data_x) | |
| #for i in range (0,len(data_x[:,0])): | |
| if (time.time()-base_time) <music_length: | |
| print("num of diff", N_image1-1) | |
| foriinrange (0,N_image1-1): | |
| print("\n---", i, "---") | |
| raw= [] | |
| forninrange (0,N_variance): | |
| raw.append(data_x[n,i]) | |
| #print (data_x[n,i]) | |
| print("raw",raw) | |
| trajectory[0,:] =raw | |
| # Reformat the trajectory for sending as an OSC message. The txosc Message | |
| # class doesn't recognize numpy values, so the pixel values are | |
| # converted to an ordinary Python list of numbers. The transpose is | |
| # used to re-order the values so each plane is sent in succession. | |
| samples= [float(value) forvalueintrajectory.flat] | |
| msg=txosc.osc.Message("/trajectory", cols, rows, *samples) | |
| # send the trajectory back to the source of the request | |
| send_host=address[0] | |
| self._client_protocol.send( msg, (send_host, self.send_portnum)) | |
| time.sleep(freq) | |
| print ("time passed", time.time()-base_time) | |
| return | |
| """ | |
| while True: | |
| for i in range (0,N_image1-1): | |
| raw = [] | |
| for n in range (0,N_variance): | |
| raw.append(data_x[n,i]) | |
| print (data_x[n,i]) | |
| #print("raw",raw) | |
| trajectory[0,:] = raw | |
| print("Hello") | |
| # Reformat the trajectory for sending as an OSC message. The txosc Message | |
| # class doesn't recognize numpy values, so the pixel values are | |
| # converted to an ordinary Python list of numbers. The transpose is | |
| # used to re-order the values so each plane is sent in succession. | |
| samples = [float(value) for value in trajectory.flat] | |
| msg = txosc.osc.Message("/trajectory", cols, rows, *samples) | |
| # send the trajectory back to the source of the request | |
| send_host = address[0] | |
| self._client_protocol.send( msg, (send_host, self.send_portnum)) | |
| print("pushexit") | |
| comand = str(input()) | |
| if comand == "exit": | |
| break | |
| return | |
| """ | |
| ################################################################ | |
| # Script entry point. | |
| if__name__=="__main__": | |
| parser=argparse.ArgumentParser( description="""Demonstration of a UDP OSC node which can communicate with Max.""") | |
| parser.add_argument( '--verbose', action='store_true', help='Emit debugging output.') | |
| args=parser.parse_args() | |
| # Set up the txosc UDP port listening for requests. | |
| osc_server=OscServer( verbose=args.verbose ) | |
| osc_server.listen( twisted.internet.reactor ) | |
| # Start the Twisted event loop. | |
| twisted.internet.reactor.run() | |
| ifargs.verbose: print("Event loop exited.") |
| importprocessing.sound.*; | |
| importprocessing.opengl.*; | |
| PImage img; | |
| AudioIn input; | |
| Amplitude rms; | |
| FFT fft; | |
| int bands=128; //FFTsize, static | |
| // | |
| float scale=10000.0; | |
| float radius_scale=0.5; | |
| // | |
| // | |
| float[] sound={0,0,0,0,0}; | |
| int loop=0; | |
| // | |
| // | |
| int nPoints=30000; | |
| float complexity =3; | |
| float maxMass=0.05; | |
| float timeSpeed=0.002; | |
| float phase=PI; | |
| float windSpeed=70; | |
| int step=10; | |
| float[] pollenMass; | |
| float[][] points; | |
| // | |
| voidsetup() { | |
| background(0); | |
| //img = loadImage("earth_2.png"); | |
| imageMode(CENTER); | |
| size(1000, 1000, P3D); | |
| blendMode(ADD); | |
| noStroke(); | |
| //to HSV | |
| colorMode(HSB,360,100,100,100); | |
| input =newAudioIn(this, 0); | |
| input.start(); | |
| // | |
| fft=newFFT(this,bands); | |
| fft.input(input); | |
| // | |
| rms =newAmplitude(this); | |
| rms.input(input); | |
| // | |
| points=newfloat[nPoints][2]; | |
| pollenMass=newfloat[nPoints]; | |
| for(int i=0;i<nPoints;i++){ | |
| points[i]=newfloat[]{ | |
| random(0,width),random(0,height) | |
| }; | |
| pollenMass[i]=noise(0,maxMass); | |
| } | |
| // | |
| } | |
| voiddraw() { | |
| fill(10,10,10); | |
| ellipse(width/2,height/2,width/4,height/4); | |
| background(70); | |
| smooth(); | |
| loop++; | |
| println(str(loop)); | |
| //background(0); | |
| float sound_size =map(rms.analyze(), 0.0, 1.0, 0.0, width); | |
| // | |
| int j; | |
| for(j=0;j<4;j++){ | |
| sound[j]=sound[j+1]; | |
| } | |
| sound[4]=sound_size; | |
| float sum_sound=0; | |
| for(int i=0;i<5;i++){ | |
| sum_sound+=sound[i]; | |
| } | |
| float ave_sound=sum_sound*radius_scale/5; | |
| if(ave_sound>700){ | |
| ave_sound=700; | |
| } | |
| // | |
| //BACK_LIGHT_COLOR | |
| //image(img, width/2, height/2, sound_size/2, sound_size/2); | |
| // | |
| fft.analyze(); | |
| float wi=width/float(bands)/2.0; | |
| for(int i=0;i<bands;i++){ | |
| float hue=360/float(bands)*i; | |
| float diameter=fft.spectrum[i]*scale; | |
| println(fft.spectrum[i]); | |
| fill(hue,100,6); | |
| noStroke(); | |
| ellipse(width/2.0+i*wi,height/2.0,diameter,diameter); | |
| noStroke(); | |
| ellipse(width/2.0-i*wi,height/2.0,diameter,diameter); | |
| } | |
| // | |
| //BACK_LIGHT_BLUE_CIRCLE | |
| // | |
| stroke(240,100,100); | |
| strokeWeight(1); | |
| ellipse(width/2,height/2,sound_size*10,sound_size*5); | |
| ellipse(width/2,height/2,sound_size*5,sound_size*5); | |
| strokeWeight(2); | |
| ellipse(width/2,height/2,sound_size*3,sound_size*2); | |
| ellipse(width/2,height/2,sound_size*3,sound_size); | |
| // | |
| //EARTH | |
| // | |
| pushMatrix(); | |
| translate(width/2,height/2,0); | |
| stroke(120,100,78); | |
| strokeWeight(2); | |
| noFill(); | |
| if(ave_sound<1000){ | |
| rotateY(loop*100); | |
| sphere(ave_sound); | |
| }else{ | |
| rotateY(loop*100); | |
| sphere(1000); | |
| } | |
| popMatrix(); | |
| // | |
| //MOON0 | |
| // | |
| pushMatrix(); | |
| translate(width/2,height/2,0); | |
| stroke(0,0,100); | |
| strokeWeight(1); | |
| translate((200+ave_sound*100/700)*cos(loop*0.1+0.4),0,(200+ave_sound*100/700)*sin(loop*0.1+0.4)); | |
| sphere(7); | |
| popMatrix(); | |
| // | |
| //MOON1 | |
| // | |
| pushMatrix(); | |
| translate(width/2,height/2,0); | |
| stroke(0,0,100); | |
| strokeWeight(1); | |
| translate((300+ave_sound*100/700)*cos(loop*0.1-0.2),0,(300+ave_sound*100/700)*sin(loop*0.1-0.2)); | |
| sphere(10); | |
| popMatrix(); | |
| // | |
| //MOON2 | |
| // | |
| pushMatrix(); | |
| translate(width/2,height/2,0); | |
| stroke(0,0,100); | |
| strokeWeight(1); | |
| translate((250+ave_sound*100/700)*cos(loop*0.1),0,(250+ave_sound*100/700)*sin(loop*0.1)); | |
| sphere(7); | |
| popMatrix(); | |
| // | |
| //star | |
| // | |
| for(int i=0; i<nPoints; i++){ | |
| pushMatrix(); | |
| float x = points[i][0]; | |
| float y = points[i][1]; | |
| float z = points[i][1]; | |
| float normx =norm(x, 0, width); | |
| float normy =norm(y, 0, height); | |
| float normz =norm(z, 0, -1000); | |
| float u =noise(phase, normx * complexity, normy * complexity); | |
| float v =noise(phase, normy * complexity, normz * complexity); | |
| float w =noise(phase, normz * complexity, normx * complexity); | |
| float speed = (1+noise(u, v, w)) / (70*pollenMass[i]); | |
| x +=lerp(-speed, speed, u); | |
| y +=lerp(-speed, speed, v); | |
| z +=lerp(-speed, speed, w); | |
| strokeWeight(z/random(100, 500)); | |
| point(x, y, z); | |
| //image(particleImg, x, y, 30, 30); | |
| points[i][0] = x; | |
| points[i][1] = y; | |
| points[i][1] = z; | |
| popMatrix(); | |
| } | |
| // | |
| // | |
| /* | |
| saveFrame("frames/######.png"); | |
| if (frameCount >= 700) { | |
| exit(); | |
| } | |
| */ | |
| // | |
| } |

SpaceApps is a NASA incubator innovation program.