


Sat0NE | Make Sense Out of Mars
Awards & Nominations
Sat0NE has received the following awards and nominations. Way to go!
The Challenge | Make Sense Out of Mars
HERMES - Completely Modular Rover
We are building a completely modular prototype which is going to be adaptable to multiple situations that may appear on Mars. We thought about a main body making possible replacements in short period of time to fight critical conditions.
The challenge|develop a sensor to be used by humans on Mars
Your challenge is to create a sensor (or cluster of multiple sensors) to be used by humans on Mars.
The Idea:
We are using existing technologies to create a tool which will help astronauts and scientists make the most out of future Mars explorations.
Our idea consists in building a completely modular prototype which is going to be adaptable on multiple situations that may appear on the red planet. We thought about multiple scenarios that should appear in space missions and came with creative solutions:
- Our tool comes equipped with a module that will be used for analyzing the atmosphere before landing to provide the best landing spot according to the needs of a colony(possible sources of water such as ice calves as close as possible to the surface), and appropriate weather conditions(not extreme ones).
- An “on wheels” module designed to be either carried on the board of the spaceship or move independently. We also thought it could be controlled as well as from the distance and by hand with a bionic sleeve which could be attached at the spacesuits and used by astronauts. Its main purpose will be to explore and investigate the surface and the underground to make the solid part of Mars a safer place for humans to set colonies on.
- A flying module meant to gather further information about the atmosphere once the first colonies will be set. Also it comes equipped with powerful propellers that can carry antennas or wrecks of fallen rovers.
We want to integrate a module with robotic arms controlled from far distance through VR (Virtual Reality). This way, grappling and deploying materials will require less effort/energy and less time.
We want to emphasize that what we came up with are only a few ideas. Our main purpose was to leave room for new ideas and development to be implemented as the time goes by and technology evolves. This is the purpose behind our modular concept. As human beings, we are able to adapt change fast enough to come up with ideas even in difficult situations and hostile environments. A main body that makes possible replacements in short period, we thought to be an ingenious idea to fight time pressure in critical conditions such as those that may occur during space missions on Mars where every second counts. Being able to replace and adjust modules as easy as possible could make the difference between a successful exploration mission and one that could be entitled a failure.
Engineering and use of hardware:
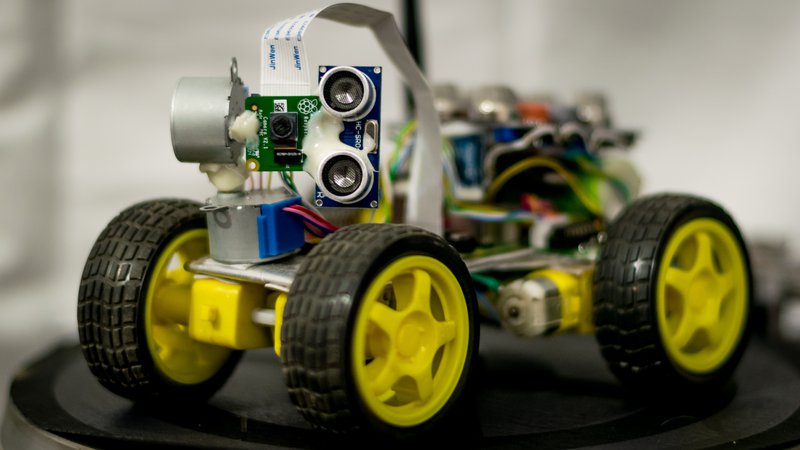
In a short period we managed to implement a layout at a smaller scale of a part of our concept.
Picture:
Up in the air, and at landing, we are using a suite of sensors meant to measure:
- Atmospheric pressure
- Temperature
- Natural gas concentration
- Highly inflammable gas quantity
- Hydrogen
- Oxygen
- Carbon monoxide
- Small dust particles
- Smoke
- Radiation level
- Proximity to other objects
-Night vision camera with 360 degrees of free motion (180 degree on each axis; tilt and pan), for “On Land ” exploration.
- Raspberry Pi compatibility
- 8 MP photo resolution
- 1080p 30fps, 720p 60fps, 640x480p 60/90fps;
- Camera serial interface connection
-Infrared camera
-Carrier H4 Hybrid drone for heavy charge
-Caterpillar tracks for hard off road and supplementary wheels on the back and sides.
-Supplementary memory storage in case of extreme meteorological conditions and possible lose of travel paths.
-4 powerful motors for the caterpillar tracks
-2 slightly less powerful stepper motors to make the camera moving possible.(28mm diameter, 5V voltage, 5.625 x 1 /64 step angle, 1/64 reduction angle, 3-5.5V logic control voltage,5-15 motor supply voltageș it can sink 500mA from a 50V supply, but we’d better limit driver voltage under 15 V;operating temperature:-80 degree Celsius - +90 degree Celsius)
-2,4 GHz high gain antenna
-Radio transmission (We are currently able to move the rover and the camera tilt/pan remotely from up to 1Km)
-2 x arduino nano(collecting all our sensors,and sending the information to our base)
The human race hasn’t touched the surface of the red planet,yet. For now the information gathering about the most colonizable planet fell on the shoulders of our robotic explorers, sent in space, by NASA. As the information gathering process is quite slow, our team looks into the future and has a solution that comes in handy for future explorations on Mars.
At the moment NASA is taking the initative and comes with ingenious solutions for creating and developing technologies which are used in elaborate space missions .
Resources:
-Arduino IDE
-Code::Blocks IDE (Test on non-hardware related code)
-Python 3
-Nano for Linux
Github repository: https://github.com/andreiro45/spaceapps
*Updated post to include Github repository and resources; changes apparently did not get saved last night

SpaceApps is a NASA incubator innovation program.