


Mars Colonizers | Make Sense Out of Mars
Team Updates
Firstly, we indicated on the fertility of the soil with the presence of methane gas only near the soil. But we found that is not sufficient to detect if the soil is fertile or not, so we searched for more factors that affects the fertility of soil and we found that the presence of the hydrogen gas near the soil is an evidence for a fertile soil. Also, hydrogen near the soil means that it is possible to find huge amounts of hydrogen gas under the ground which can be used as future fuel.
During our researches to develop the abilities of our robot, we found that hydrogen, methane and propane are evidences for early life on Mars and the presence of natural gas and petroleum under the ground. We also found that the presence of carbon monoxide near the ground is an evidence for the presence of iron ores.
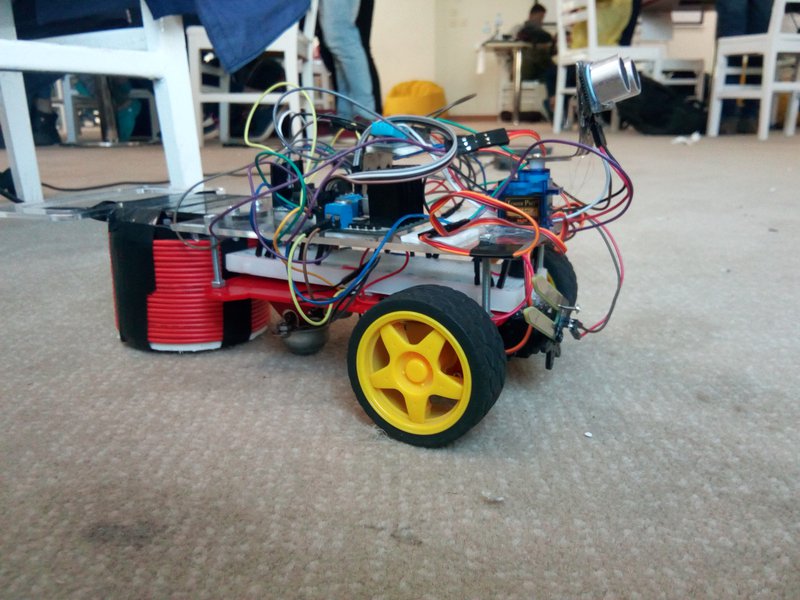
So, we added all these features to our prototype through both hardware device (gas sensor MQ2) that detects all these gases and software Arduino code.
| //arduino code | |
| /*the IDE of the arduino will not compile this code until you download the libraries mintioned in the code ,, the first library is "dht" library and the second is | |
| "Servo" library .. if you use the code without downloading libraries , the IDE will show compiling errors*/ | |
| #include <Servo.h> //the Servo library | |
| #include "dht.h" //the humidty sensor library | |
| const int trigPin = 8; // trig pin of ultrasonic | |
| const int echoPin = 13; // echo pin of ultrasonic | |
| long duration; // the time taken by ultrawaves from the emmiting side to the receving side | |
| int distance; // the distance travelled by the ultrawaves | |
| #define dht_apin A2 // the analog pin of the humidty sensor (because it depends on resistance) | |
| #define gasanalog A3 // the analog pin of the gas sensor (because it depends on resistance) | |
| #define capPin A5 // the first analog receving pin of the metal detector | |
| #define pulsePin A4 // the second analog receving pin of the metal detecor | |
| #define led 10 // the OUTPUT of the Led of the metal detector | |
| #define in1 2 // the first pin controlling with the direction of the right motor | |
| #define in2 3 // the second pin controling with the direction of the right motor | |
| #define in3 4 // the first pin controlling with the direction of the left motor | |
| #define in4 5 // the second pin controling with the direction of the left motor | |
| #define buzzer 9 // the pin controling the buzzer of metal detector | |
| int buz = 12; // the pin controling the buzzer of the (gas sensor, humidty sensor and moisture sensor) | |
| #define moist A0 // the pin receving the analog read of the moisture sensor because it woks as a variable resistance | |
| int moistureread; // the variable taking it's value form the pin "A0" especially the pin called "moist" | |
| int deg; // the degree of rotation of moisture servo | |
| long sumExpect=0; // the first variable responsibel for metal detector calculation | |
| long ignor=0; // the second variable responsibel for metal detector calculation | |
| long diff=0; // the third variable responsibel for metal detector calculation | |
| long pTime=0; // the fourth variable responsibel for metal detector calculation | |
| long buzPeriod=0; | |
| dht DHT; //function from the library "dht.h" that actives the humidty/tempreature sensor | |
| Servo servo; //function from the library "Servo.h" to define the first servo | |
| Servo moisture; //function from the library "Servo.h" to define the second servo | |
| void setup () { | |
| pinMode (trigPin, OUTPUT); //set the pin "trigpin" to be an output for the data | |
| pinMode (echoPin, INPUT); //set the pin "echopin" to be an input for the data | |
| pinMode (in1, OUTPUT); //set the pin "in1" to be an output to give HIGH or LOW signals from the arduino to the H-Bridge control the direction of rotation for the motor | |
| pinMode (in2, OUTPUT); //set the pin "in2" to be an output to give HIGH or LOW signals from the arduino to the H-Bridge control the direction of rotation for the motor | |
| pinMode (in3, OUTPUT); //set the pin "in3" to be an output to give HIGH or LOW signals from the arduino to the H-Bridge control the direction of rotation for the motor | |
| pinMode (in4, OUTPUT); //set the pin "in4" to be an output to give HIGH or LOW signals from the arduino to the H-Bridge control the direction of rotation for the motor | |
| pinMode(pulsePin,OUTPUT); //set the pin of the pulse of the metal detector to give pulses to the metal detector by the arduino | |
| pinMode(capPin, INPUT); //set the capacitor pin of the metal detector to be an input to read the capacitor by the arduino analog pins | |
| pinMode(led, OUTPUT); //set the led pin resposible for the metal detector to be an output | |
| digitalWrite(pulsePin, LOW); //set the pulse pin of the metal detector to LOW in a kind of saftey step to get the accurate reading | |
| digitalWrite(buzzer, LOW); //set the buzzer pin of the metal detector to LOW to stop it from buzzing if it was buzzing befor restarting the arduino | |
| Serial.begin(9600); //start the serial number (9600) so the rate of transferring data to the arduino is 9600 bits/second | |
| servo.attach(11); //attach the servo of the ultrasonic in the pin 11 | |
| moisture.attach(7); //attach the servo of the moisture sensor in the pin 7 | |
| pinMode(buzzer, OUTPUT); //set the mode of the buzzer of the metal detector to be an output | |
| pinMode(buz, OUTPUT); //set the mode of the other sensors (gas sensor, humidty sensor adn smoiture sensor) to be an output | |
| } | |
| void loop () { | |
| measure(); //A defined function below that measures the distance using ultrasonic and put the value in the variable called "distance" declared above... | |
| // first robot turning condition | |
| if(distance<25){ //if the distance in front of the robot was less than 25 cms, the ultrasonic will turn right and see if the robot can turn right or no | |
| for(deg=90 ; deg<=180 ; deg+=1){ //a for function responsible for the movment of the servo holding the ultrasonic to right | |
| servo.write(deg); //giving the servo the values of the counting for function to turn right | |
| delay(15); } //delay for the servo to prevent it from turning very fast | |
| measure(); //A defined function below that measures the distance using ultrasonic and put the value in the variable called "distance" declared above... | |
| if(distance>25){ //if the distance in the right dirction was more than 25 cms .. then the robot will turn right | |
| digitalWrite(in1, HIGH); //giving the "in" pins of a motor HIGH and LOW values makes the motor rotating in specific direction | |
| digitalWrite(in2, LOW); //for exmaple if a motor was given a HIGH, LOW values respectively according to my connections, the motor will move forward | |
| digitalWrite(in3, LOW); //here the first motor will move forward becuase it's given HIGH, LOW values respectively ... | |
| digitalWrite(in4, HIGH);} //and the second motor will move backwards because it's given LOW, HIGH values respectivley.. and the net movment of the robot will be turning right | |
| if(distance<25){ //if the distance in the right direction was less than 25 cms, the ultrasonic will turn left and see if the robot can turn right or no | |
| for(deg=180 ; deg>=0 ; deg-=1){ //a for function responsible for the movment of the servo holding the ultrasonic to left | |
| servo.write(deg); //giving the servo the values of the counting for function to turn left | |
| delay(15);} //delay for the servo to prevent it from turning very fast | |
| measure(); //A defined function below that measures the distance using ultrasonic and put the value in the variable called "distance" declared above... | |
| for(deg=0 ; deg<=90 ; deg+=1){ //a for function responsible for the movment of the servo holding the ultrasonic to the standard position | |
| servo.write(deg); //giving the servo the values of the counting for function to go to the standard position | |
| delay(15);} //delay for the servo to prevent it from turning very fast | |
| if(distance>25){ | |
| digitalWrite(in1, LOW); //giving the "in" pins of a motor HIGH and LOW values makes the motor rotating in specific direction | |
| digitalWrite(in2, HIGH); //for exmaple if a motor was given a HIGH, LOW values respectively according to my connections, the motor will move forward | |
| digitalWrite(in3, HIGH); //here the first motor will move backwards becuase it's given LOW, HIGH values respectively ... | |
| digitalWrite(in4, LOW);} //and the second motor will move forward because it's given HIGH, LOW values respectivley.. and the net movment of the robot will be turning left | |
| if(distance<25){ | |
| digitalWrite(in1, LOW); //giving the "in" pins of a motor HIGH and LOW values makes the motor rotating in specific direction | |
| digitalWrite(in2, HIGH); //for exmaple if a motor was given a HIGH, LOW values respectively according to my connections, the motor will move forward | |
| digitalWrite(in3, LOW); //here the first motor will move backwards becuase it's given LOW, HIGH values respectively ... | |
| digitalWrite(in4, HIGH);} //and the second motor will move backwards because it's given LOW, HIGH values respectivley.. and the net movment of the robot will be moving back.. | |
| }} | |
| else { | |
| digitalWrite(in1, HIGH); //giving the "in" pins of a motor HIGH and LOW values makes the motor rotating in specific direction | |
| digitalWrite(in2, LOW); //for exmaple if a motor was given a HIGH, LOW values respectively according to my connections, the motor will move forward | |
| digitalWrite(in3, HIGH); //here the first motor will move forward becuase it's given HIGH, LOW values respectively ... | |
| digitalWrite(in4, LOW);} //and the second motor will move forward because it's given HIGH, LOW values respectivley.. and the net movment of the robot will be moving forward | |
| DHT.read11(dht_apin); //function in the library of the humity/tempreature sensor that reads the humidty and temp. | |
| Serial.print("Current humidity = "); //function called "print" is used to display the wards "Current humidity = " in the serial monitor | |
| Serial.print(DHT.humidity); //function called "print" is used to display the determined humidty in the serial monitor | |
| Serial.println("% "); //this function "println" is a function used also to display something in the serial monitor and taking new line after pinting.. | |
| Serial.print("temperature = "); //the same as the functions explained above.. | |
| Serial.print(DHT.temperature); //the same as the functions explained above.. | |
| Serial.println("C "); //the same as the functions explained above.. | |
| if (DHT.humidity>=10){ //if the relative humidty was more than 10% ... | |
| digitalWrite(buz, HIGH);} //the buzzer will make a sound | |
| delay(1000); //this delay is made to determin the humidty, if the humidty was high, the buzzer will make sound, but because 3 sensors work on the same | |
| //-same buuzer, if the humidty was high but the gas read wasn't high, the buuzer will not make sound for more than some microseconds... | |
| if(DHT.humidity<10){ //if the relative humidty was less than 10% ... | |
| digitalWrite(buz, LOW);} //the buzzer will stop making sound | |
| int gasread = analogRead(gasanalog); //declaring the variable called gas read that takes it's value form the analog read in the pin A3 | |
| Serial.print("gas read = "); //printing the words "gas read =" on the serial monitor | |
| Serial.println(gasread); //printing the value of the gas read on the serial monitor | |
| if(gasread >=50) { //if the gas read was above 50 and hydrogen or ch4 or propane or carbon monoxide were detected.. | |
| digitalWrite(buz, HIGH);} //the buzzer will make sound | |
| delay(1000); //this delay is made to determin the gasread, if the gasread was high, the buzzer will make sound, but because 3 sensors work on the same | |
| //-same buuzer, if the gasread was high but the moisture read wasn't high, the buuzer will not make sound for more than some microseconds... | |
| if(gasread< 50){ //if the gasread was less than 50 ... | |
| digitalWrite(buz, LOW);} //the buzzer will stop making sound | |
| for (deg=0 ; deg<= 180 ; deg = deg+1){ //for function responsible for the moisture sensor servo movment | |
| moisture.write(deg); //giving the moisture servo the value of the variable "deg" to let it turn | |
| delay(15);} //delay for the servo to prevent it from turning very fast | |
| moistureread=analogRead(moist); //giving the variable called moistureread the analog read value of the pin A0 | |
| Serial.println(moistureread); //a "println" function used to display the read of the moisture sensor and taking new line after printing | |
| if(moistureread>900){ //if the moisture read was more than 900 *this value may seem huge compared to the normal moist of mars but the moisture sensor was used | |
| digitalWrite(buz, HIGH);} //-used without the lm393 compiling chip... so it's very sensitive for humidty, of the humidty was just a little higher than normal | |
| //-normal .. the buzzer will make sound | |
| if(moistureread<900){ //if the moisture read was less than 900, the buzzer will stop making sound | |
| digitalWrite(buz, LOW);} //here in the moisture part no delay was used because the buzzer will have long time to make sound before the code is repeated | |
| for (deg=180; deg>=0; deg=deg+1){ //this for function is responsible for making the servo turn back to it's standard position | |
| moisture.write(deg);} // the end of the code ^-^ | |
| /* ***************************************************************************** the metal detector part ***************************************************************************** */ | |
| int minval=1023; | |
| int maxval=0; | |
| long unsigned int sum=0; | |
| for (int i=0; i<256; i++){ //this is roughly long "For Function" .... nessecary for the metal detector ... | |
| //reset the capacitor | |
| pinMode(capPin,OUTPUT); | |
| digitalWrite(capPin,LOW); | |
| delayMicroseconds(20); | |
| pinMode(capPin,INPUT); | |
| applyPulses(); | |
| //read the charge of capacitor | |
| int val = analogRead(capPin); //takes 13x8=104 microseconds | |
| minval = min(val,minval); | |
| maxval = max(val,maxval); | |
| sum+=val; | |
| long unsigned int cTime=millis(); | |
| char buzState=0; | |
| if (cTime<pTime+10){ | |
| if (diff>0) | |
| buzState=1; | |
| else if(diff<0) | |
| buzState=2;} | |
| if (cTime>pTime+buzPeriod){ | |
| if (diff>0) | |
| buzState=1; | |
| else if (diff<0) | |
| buzState=2; | |
| pTime=cTime; } | |
| if (buzPeriod>300) | |
| buzState=0; | |
| if (buzState==0){ | |
| digitalWrite(led, LOW); | |
| noTone(buzzer);} | |
| else if (buzState==1){ | |
| tone(buzzer,2000); | |
| digitalWrite(led, HIGH);} | |
| else if (buzState==2){ | |
| tone(buzzer,500); | |
| digitalWrite(led, HIGH);} | |
| } //the end of the long for function ... | |
| sum-=minval; //subtract minimum and maximum value to remove spikes | |
| sum-=maxval; | |
| if (sumExpect==0) | |
| sumExpect=sum<<6; //set sumExpect to expected value | |
| long int avgsum=(sumExpect+32)>>6; | |
| diff=sum-avgsum; | |
| if (abs(diff)<avgsum>>10){ | |
| sumExpect=sumExpect+sum-avgsum; | |
| ignor=0;} | |
| else | |
| ignor++; | |
| if (ignor>64){ | |
| sumExpect=sum<<6; | |
| ignor=0;} | |
| if (diff==0) | |
| buzPeriod=1000000; | |
| else | |
| buzPeriod=avgsum/(2*abs(diff)); | |
| } | |
| /* ***************************************************************************** the metal detector part ***************************************************************************** */ | |
| void measure(){ | |
| digitalWrite(trigPin, LOW); //set the trigger pin of the ultrasonic to LOW in a kind of satey step to ensure that the reading of the echo will be right | |
| delayMicroseconds(2); //micro-seconed delay fot the ultrasonic | |
| digitalWrite(trigPin, HIGH); //set the trigger pin to HIGH to send the ultrasignals | |
| delayMicroseconds(10); //micro-seconed delay to give the ultrasonic the suitable time to send the ultrawaves properly | |
| digitalWrite(trigPin, LOW); //set the trigger pin to LOW after the ultrawaves are sent | |
| duration = pulseIn(echoPin, HIGH); //use the pulseIn function to determine the time took by the ultrawaves to reflect on an obsacle and go back to the echo side | |
| distance= duration*0.034/2; //calculating the distance taken by the ultrawaves using the law "distance=time*speed" in the terms of the speed of ultrawaves (340 meters/second) | |
| Serial.print("Distance: "); //printing in the serial monitor the word "distance" to print the distance determined by the ultrasonic after it | |
| Serial.println(distance); //printing the distance and taking new line after the printing the value to avoid the interferance of the multiple data | |
| delay(100); //giving the arduino small rest after measuring the distance | |
| } | |
| void applyPulses(){ | |
| for (int i=0;i<3;i++) { | |
| digitalWrite(pulsePin,HIGH); //take 3.5 uS | |
| delayMicroseconds(3); | |
| digitalWrite(pulsePin,LOW); //take 3.5 uS | |
| delayMicroseconds(3);}} |

SpaceApps is a NASA incubator innovation program.