


Team Tubey | Design by Nature
Awards & Nominations
Team Tubey has received the following awards and nominations. Way to go!
The Challenge | Design by Nature
Autonomous Free Flyer for Space Ship Inspection, based on 3D and 2D cameras with Carbon Dioxide Base Thrusters
Autonomous Free Flyer for Space Ship Inspection, based on 3D and 2D cameras with Carbon Dioxide Base Thrusters
Introduction
According to the NASA study of 135 space missions, IAC-11.A6.3.7, every misson has impact from micro meteoroid & orbital debris (MMOD). These impacts are in the range of micrometers to millimeters. These types of damage have a high level of risk to the life of the aircraft's crew due to their thermal protection, which must remain stable to withstand the high temperatures reached on entering the Earth's atmosphere. This rupture may cause the aircraft to expose itself, such as the Columbia bus [1].
The Project aims to construct an autonomous free-flyer to inspect space ships. This device must have a 6 degrees of freedom to ensure its flexibility and it have to it has to be able to identify a best route inspection route and identify damage to the ship's surface.
Problem Overview
A NASA survey recorded the amount of damage generated by MMOD, and pointed out the number of impacts on each space mission.
NASA SHUTTLE HYPERVELOCITY IMPACT DATABASE
These types of damages vary in their depth and width. The most recurring places are in the windows and in the door compartments of the nave[3].
Proposed Solution
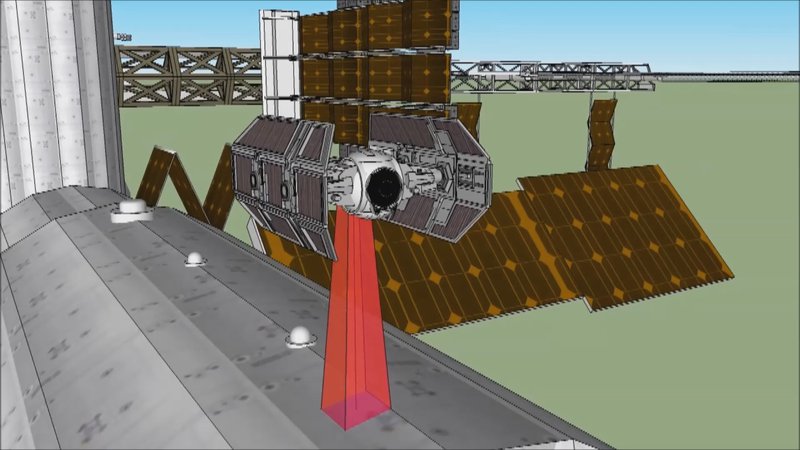
The proposal consists of the development of the project of a autonomous free-flying. The sensor for detecting MMOD will consist basically of two cameras: a conventional 2D and a 3D camera for aircraft structure inspection and mapping, photo voltaic panels for energizing and charging the batteries and carbon dioxide (CO2) propellant modules.
Inspection Tools
Through photogrammetry made with the help of 2D camera photos, it is possible to obtain photographic data of the surface of the aircraft. One of the advantages of photogrammetry is that the object being photographed is not touched, eliminating the risk of damage to the surface of the aircraft and its thermal protection, as well as the rapid acquisition of data, a large amount of semantic and geometric information.
The conventional 2D camera will have a horizontal and vertical laser beams lightning system to generate a grid over the surface,making possible to see deformations in the surface of the aircraft.
The 3D camera will model the surface of the aircraft for modeling so that you can have information about the damage caused, the depth and diameter of the surface damage. Below is an example of a high-resolution 3D camera, where a key surface is modeled so that you can demonstrate the equipment's capacity.
For image identification an artificial intelligent, like YOLO, can be used. Using previous data from others impacts for training the system.
Mobility and Power System
One of the problems in space is related to the vacuum, limiting the use of fossil fuels and the use of propellers or turbines. Due to the absence of oxygen in space, one of the ways for a propellant mode for displacement, whether angular or linear, is gas propulsion. Through a cylinder with pressurized CO2, generated inside the spacecraft itself, the free-flyer will be able move around in space.
The choice of CO2 as "fuel" for propulsion is due to the continuous production of the same by the crew in the aircraft through the process of cellular respiration, aiming to give a suitable and compensatory destination for carbon dioxide.
The carbon dioxide removal system (CDRA) on the International Space Station works by removing the CO2 from the air booth and throwing it out of the ship, allowing the cabin to be safe [5].
The project proposes that CO2 be compressed into capsules in order to become a propellant that will be used in its movement.
In order to the device to be a free-flying vehicle, a movement with 6 degrees of freedom is required. Then each side of its structure must have two propellers. The free-flyer must be completely autonomous, ie there will be no one inside riding, so that it can be more compact and have a lower energy consumption. If there is a need to move to a specific point, it must be done remotely from inside the aircraft.
The mapping should start from a pre-defined starting point and do the rest of the process to previously defined points by the IR and RF sensors in the aircraft structure.
With sensors on the exterior of the aircraft, IR and RF, the robot will know its coordinate, to correct possible perturbations that altering its mapping path, that is, a intelligent closed-loop control so that it can return to the previous position.
The system of free-flyer energy will be done through battery and photo voltaic panels, as it is one of the only means of generating electric energy in space is extremely profitable because it obtains 100% of the intensity of solar radiation, different from the Earth that receives 70% of the intensity of solar radiation due to terrestrial atmosphere. Another advantage is that in space there are no obstacles to the incidence of solar radiation, such as clouds [4].
Results
Using a kinect 3D Scanner, it was possible to model a test plate, as can be see in the video. It's does not have a good quality, but the holes could be identify. Using a high resolution 3D camera, it would be possible to make a high quality 3D model [6].
Conclusion
With the resources and time available for the team, it was possible to generate a satisfactory 3D model of a test board. It was not possible to test the thrusters, but in theory the system should work, giving destination to a waste that is currently discarded by space ships.
Thus, with advanced resources and equipment, it can be said that the proposed system is viable.
References
[1] /challenges/can-you-build/design-based-nature-fusion/details
[2] https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa....
[4] https://www.energy.gov/articles/space-based-solar-...
[5] https://www.nasa.gov/pdf/146558main_RecyclingEDA%28final%29%204_10_06.pdf
[6] https://raytrix.de/inspection/

SpaceApps is a NASA incubator innovation program.