


SpaceBeakers | Design by Nature
Team Updates
Autonomous space drone, designed for a full analysis of impacts caused by micrometeorites and orbital debris on the International Space Station. Equipped with a wide variety of sensors based on echolocation, being the principal of these the 3D perception sensor for a detailed analysis (resolution 0.05mm) and the radar for a faster analysis with lower resolution (1mm), said sensors will analyze the ISS structure as well as its geometry, detecting sharp edges or possible dangers for the astronaut who repairs.
It use ionic propulsion in all its axes so it achieves full visibility and do not have blind spots, in addition to being the most efficient system of propulsion.
The dome shape also relied on nature since we can observe the deformation that generates the gravity on mountains or the Earth, making them take the semi-round form with which it resists the constant pressure.
Is manufactured with an aluminum, titanium and magnesium alloy to resist the pressure and the possible hits by micrometeorites. The dome is easily removable, giving easy access to its inside for reparations if it is necessary, because internally everything is modular.
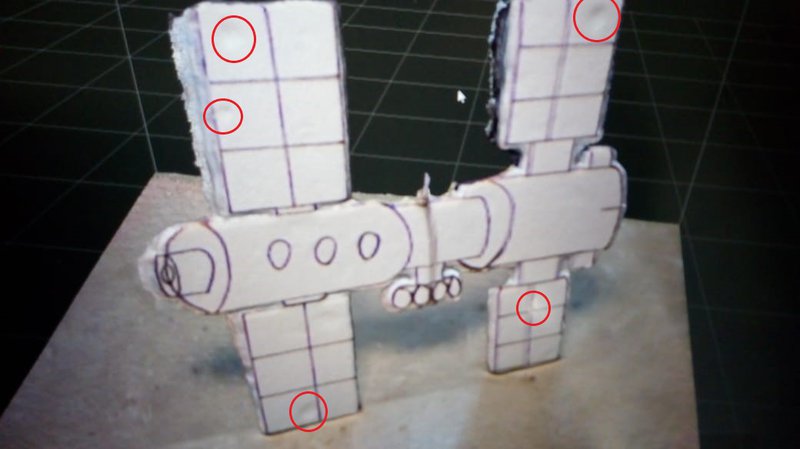
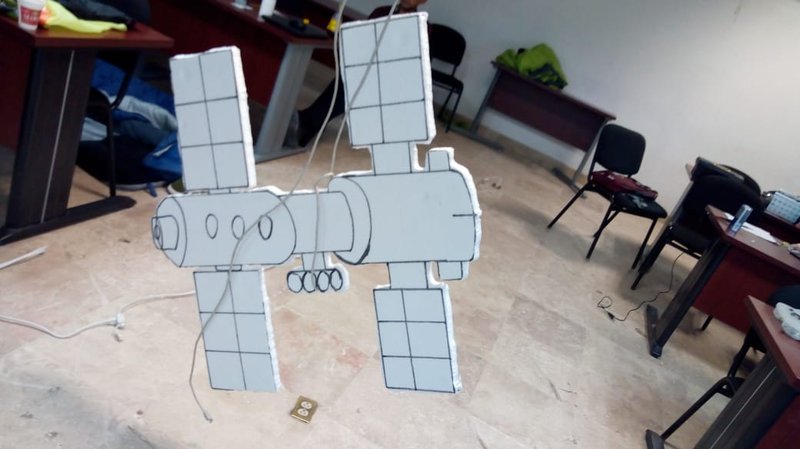
In our project we are developing a device that will detect impacts created by micrometeorites and space debris in a ship by means of 3D depth scanner in addition to a radar, the impacts made by micrometeorites leave craters in the structure of the ship of the approximate width of a millimeter and those generated by space debris will depend on the size of the same, to detect them the robot will make a round around a section of the ship (since it will not be a single robot if not a squadron of these) and by means of radar It will map the ship in search of some imperfection, when detecting some anomaly, what it will do will be closer to that deformation and by means of the 3d depth sensor it will realize another even more precise and detailed mapping of the hole seen from the depth and shape of it. any surface of the ship, in addition to this mapping, more sensors will be in charge of studying and analyzing the deformation in a more exhaustive way. How are the thermal sensors and infrared to see that the temperature of the area is within the parameters, a fiber-optic to take photos at good resolution of the crater, an ultrasonic leak detector to see, worth the redundancy, detect possible leaks in the ship , this robot will be driven by ionic propellers that will allow a great mobility around its sector and be able to do the mapping, all this will be done automatically without the need for human control other than receiving the report of the impact of the micro meteor and the space debris, as soon as the structure was based on a rectangular prism which will have as a protection a dome that will help it resist impacts of micrometeorites and space debris as well as help in bearing the pressure exerted by space, obviously the robot would be properly pressurized, the robot to give an easy maintenance in space will be modular, that is, it will be easy to replace parts that no longer serve even if the same robot will indicate the damaged part and the operator in the ship will only have to exchange the damaged piece for another as it will be easy to install, with this project we plan to solve the problems that lie in the detection and subsequent revision of this type of damage since the arms destined for that can not completely monitor the ship leaving blind spots, which are reviewed by the astronauts themselves who are exposed to an infinity of risks and problems such as going out into the space that is already in case it has a great amount of risks for the human life of the same ones, either to receive impacts of the same micrometeorites and the space debris that could produce damages in the suit of the astronaut or in the same revision has a sharp edge of this can cut the suit making this work difficult, because with this project it is expected that it will replace the human being in this dangerous task, besides carrying it out in a faster and even more detailed way, with more data collection and a great potential so that in the future it can work to maintain the ship in addition to providing support in future space missions already in monitoring, assistance, data collection and maintenance of ships, satellites, iss, etc.



SpaceApps is a NASA incubator innovation program.