


Satellants | Design by Nature
The Challenge | Design by Nature
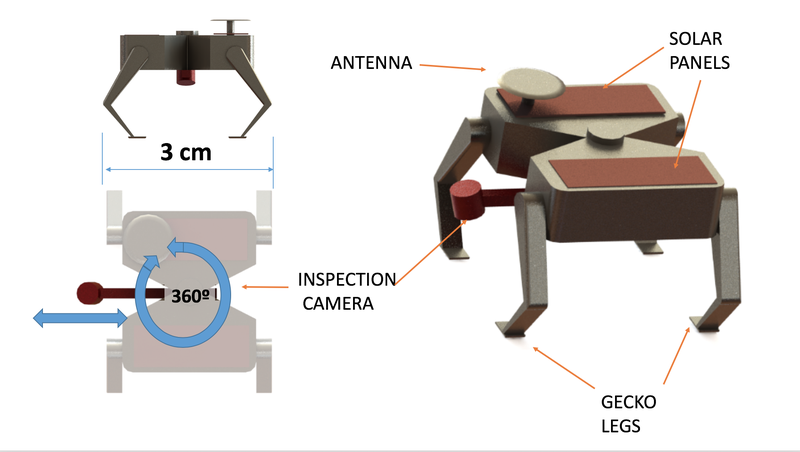
Geckobot
Inspired by geckos' natural adherent capabilities, Geckobots inspect spacecraft external surface impacts made by MMOD.
Our solution to the challenge “Design by nature”, consists in applying modifications to the already existing NASA free-flyers, AERCam and SPHERES, with the objective on making them able to transport smaller drones. These drones, which we have affectionately named “geckobots”, have been designed to work in supervision tasks of structures potentially hit by MMODs, to where they will arrive through an AERCam equipped with a “gecko cannon”, alongside other upgrades, that will deploy our geckobots on the area.
Our creations have been inspired by geckos and their ability to attach to different surfaces through Van der Waals bonds, a technology that has already been created by the company nanoGriptech, and presents different features to help them accomplish their task. The geckobots are equipped with flexible and adhesive legs that will allow them to walk through the exterior of the ship or satellite, and reduce the kinetic impact after deployment; solar panels to obtain energy out on their missions, a rotative inspection camera to detect craters, and an antenna for communication with the mothership.
On the other side, our upgraded AERCams present two opposite nozzles for movement combined with inertial disks, the aforementioned “gecko cannon” for unit landing, an IR inspection camera, an antenna for communication, and a position assignment laser for the gecko cannon.
Finally, we believe that our project can be used to increase space travel safety and open the possibility of commercial flights in the future, as well as doing so with a manageable device that can reach the blind spots of different space vehicles and mark the position of impacts.
Resources, further information and files are available in the following link:
https://github.com/vgpastor/SatellanAnt
Best,
Satellants Team

SpaceApps is a NASA incubator innovation program.