


Mohawk College Astronauts | Design by Nature
Awards & Nominations
Mohawk College Astronauts has received the following awards and nominations. Way to go!
The Challenge | Design by Nature
ERCSIUS - External Remote-Controlled Surface Inspection Unit System
Our ERCSIUS Free Flyer is a autonomous free flyer that will evaluate damage to space equipment from MMODs.
ERCSIUS - External Remote-Controlled Surface Inspection Unit System
Micro Meteorites and Orbital Debris (MMODs) regularly cause damage to spacecraft and space stations, current solutions for damage inspection require active participation and control by crew members. Our proposed solution is an autonomous free flying craft with integrated sensors on board that will be able to identify, evaluate MMODs and communicate the data to the crew to determine the extent of the damage.
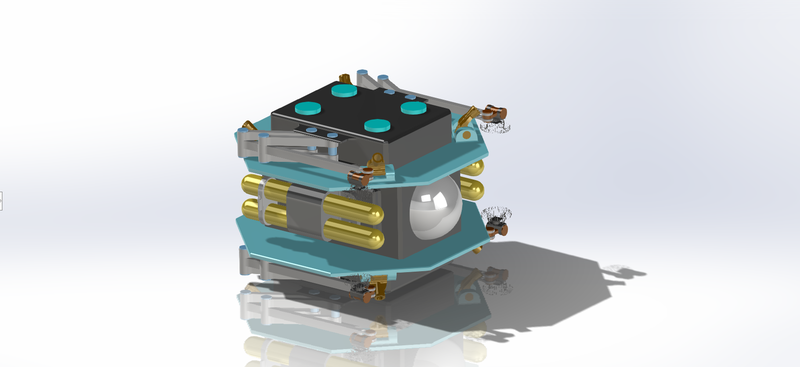
DESIGN:
The shape of the flyer is inspired by the cube sat and designed to be compact and efficient as possible. It has several properties which allow it to function. The key aspects of the design are:
- Movement:
- Movement will come in the form of 8 RCS (reaction control system thrusters) located at the corners of the flyer. This will allow combinations of ports to thrust to create different movements. For instance, the top 4 thrusters all activating at once will produce lateral movement down, while only two will produce a sideways motion.
- In addition, 4 thrusters will be able to compensate for the change in center of mass when the arms are extended
- Internal stability will be handled by two or more internal gyroscopes to hold attitude in space
- Arm Design:
- The Arms are moved by the act of parallel swing bars, which hold the 4 arms stable and parallel while extending. As such there needs only to be power on one portion, the internal smaller arms, thus eliminating the need for complex movement geometries
- The Swivel head near the end of the arm that holds the grip pad as well as the cushioning metal tendrils will have small gears to move the two parts; firstly, to keep the pads away from the RCS thrusters as well as be able to micro position for final contact to the surface for best contact results and to avoid additional damage to the surface
- Fuel
- There are 4 fuel tanks mounted on the body of the flyer.
- These each have a volume of 86.86 cubic inches for a total volume of roughly 347.44 cubic inches (5.7L), which leads to a best case scenario of 8 hours operation time.
- The free flyer will be controlled within space using an autonomous reaction control system using AF-M315E propellant. This propellant is more fuel efficient, has greater stability, and is less toxic than traditional propellant due the use of hydroxyl ammonium nitrate.
- Superstructure and Materials
- The superstructure of the device is made of pairs of octagonal plates (for mounting the RCS along 45° from the nominal planes).
- Ideally the superstructure will be made of aluminium to provide lightweight and study, with the arms made of a high impact resistant material (such as carbon fibre)
SENSORS:
The free flyer will be outfitted with different types of imaging sensors that will be used to collect data from the impact zones. Once the free flyer has returned to the craft the data can be access and evaluated by the crew. The sensors used will be:
- Laser Dynamic Range Imager (LDRI):
- Intensified Television Camera (ITVC)
- Laser Camera System (LCS)
- A single LED light will be mounted with the sensors to be used as needed.
Used together these imaging systems will be able to generate 3D images and 3D point clouds of any defects or damage being inspected.
METHODOLOGY AND CONTROL:
The flyer will be able to autonomously maneuver and position itself relative to the spacecraft using multilateration radio communications, which will also allow crew members to check the status and adjust the flyer in real time.
The craft will hover travel over the surface in a spiral, centered around the longitudinal axis, on a pre-programed path. This will allow for a single path of motion, which will then allow for a continuous stream to compare against an already captured set of images to locate differences in the surface geometry. Since there is a craft mounted LED light there will not be an issue with lighting.
When an object is identified, it will approach the surface geometry for a closer image, then return to the path to continue surface mapping. If the craft cannot safely find a solution to land, control will be handed over to the astronauts or mission control for manual approach and diagnostic.
INSPIRATION BY NATURE
The flyer faces a unique set of challenges, it must be able to inspect surfaces with a wide range of surface geometries in the challenging environment of space. Our group derived inspiration from various mediums in nature to solve these issues.
- Path
- The path will be one inspired by spider webs. Spider webs are formed in such a way as to hold an arithmetic spiral in place. These are created to cover as much 2-D space as efficiently with the least amount of material. We can apply this idea in 3-D to create a spiral which will cover the entire exterior of an object with the least amount of path needed.
- Grip Pads
- The Grip pads at the end of the arm were inspired by geckos feet. The adhesive is a synthetic polymer which relies on the spring constant. As the ‘spring’ polymer is extended, it reduces the spring constant so more and more force is required to pull away. When relaxed the spring releases and separation occurs.
- Metal Tendrils
- The arm heads have many metal tendrils surrounding it. This takes inspiration for how water striders use surface tension to apply force on a liquid to keep themselves away from it. While these do not directly hold the craft away from the surface, they do cushion the impact and lessen the force the surface will have when the flyer attempts to inspect the surface geometry.
With the ERCIUS being a wonderful proposed solution, further tests and evaluation of the idea must be done. Therefore, providing next steps into the development of the free flyer is necessary. These steps are:
- Prototyping a development model, components, and coding with the multilateration
- Further experimenting with the gecko inspired adhesive to improve efficiency
- Continued development of AF-M315E fuel to improve sustainability and synthesizing efficiency
References:
- (n.d.). Retrieved October 21, 2018, from https://www.nasa.gov/mission_pages/station/researc...
- (n.d.). Retrieved October 21, 2018, from https://technology.nasa.gov/sensors
- Christiansen, E. L., & Rollins, M. (2012, February 29). MMOD Risk/External Inspection Needs for Re-entry TPS. Retrieved October 21, 2018, from https://www.nasa.gov/pdf/626427main_1-5_Rollins_Ch...
- E. (n.d.). CubeSats: From educational tools to autonomous space drones. Retrieved October 21, 2018, from https://m.esa.int/Our_Activities/Space_Engineering...
- Grothaus, M. (2016, January 28). These Gloves Let You Climb Walls Like Spider-Man. Retrieved October 21, 2018, from https://www.fastcompany.com/3056023/these-gloves-l...
- Jiang, H., E., Hawkes, W., Fuller, C., Estrada, M. A., Suresh, S. A., . . . Cutkosky, M. R. (2017, June 28). A robotic device using gecko-inspired adhesives can grasp and manipulate large objects in microgravity. Retrieved October 21, 2018, from http://robotics.sciencemag.org/content/2/7/eaan454...
- Knapton, S. (2017, June 28). Sticky 'space Velcro' developed by Nasa to clear up junk in orbit . Retrieved October 21, 2018, from https://www.telegraph.co.uk/science/2017/06/28/sticky-space-velcro-developed-nasa-clear-junk-orbit/
- Multilateration. (2018, May 24). Retrieved October 28, 2018, from https://en.wikipedia.org/wiki/Multilateration
- Spider Webs: Creepy or Cool? (2015, June 17). Retrieved October 21, 2018, from http://recursiveprocess.com/mathprojects/index.php...

SpaceApps is a NASA incubator innovation program.