


LOMAN | Design by Nature
The Challenge | Design by Nature
LOMAN ROBOT
Our robot moves in an orbit fixed around the spacecraft to capture photos and detect any defects in the body of the spacecraft or any body approaching it, and when the sensor detects any defects it decreases its speed.
CAN YOU BUILD/DESIGN BY NATURE
Space explorers need to see the outside body of their spacecraft. Remember how the Apollo 13 crew was almost lost as they had no cameras to image the exterior body of the space craft.
In the future space crafts that will travel to and beyond the moon so it faces high risk so there should be some kind of safety to help the spacecraft in the future missions.
HOW THE ROBOT WORKS???
WHAT DOES IT DO??
Our robot moves in an orbit fixed around the spacecraft to capture photos and detect any defects in the body of the spacecraft or anybody approaching it, and when the sensor detects any defects it decreases its speed.
Mechanical design & features
- We made the frame of our mini robot from Titanium to endure high pressure.
- We had made the wheels from iron to stay attached to the orbit.
- We used 4 motors
- And we fixed 4 360 degrees Camera and 4 color sensors .
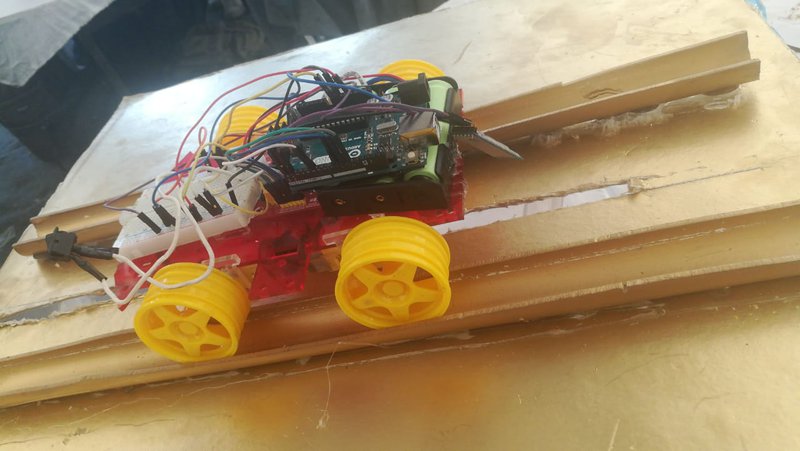
CONTROL SYSTEM & POWER CIRCUITS
- The robot moves automatically and it keeps moving until the sensors detect any defects so it gets slower to capture more photos with more details. And the astronaut can control it using RF module.
- color sensor
- Nano camera.
- Arduino as a micro controller.
4 DC motor drivers.
IMAGE PROCESSING
- CAMERAS: 4 Night vission Cameras with dimensions 9.5 *9.5*12 mm, Price: 39$.
- SENSORS: We used 4 color sensors that has the typical color of the space ship surface if the camera or the sensor captured any change in the surface color it will give the robot orders to slow down to capture more accurate images and alert the astronaut, and dimensions 28.4*28.4 mm, Price from 5 to 9 dollars.

SpaceApps is a NASA incubator innovation program.