


Kritikal | Design by Nature
The Challenge | Design by Nature
Crawler Robot for MMOD inspection
An adhesive-leg robot equipped with proximity sensors and IR sensors that surfs the spacecraft surface for MMOD impact detection
Challenges:
1. Transportation mode
2. Power source
3. Autonomy including the mapping algorithm and the path planning algorithm
Resources:
1. http://bdml.stanford.edu/Main/HomePage
2. https://www.dexterindustries.com/gopigo3/
3. N. Sariff and N. Buniyamin, "An Overview of Autonomous Mobile Robot Path Planning Algorithms", Buniyamin
4th Student Conference on Research and Development (Scored 2006), June 2006
4. AK Guruji, "Time-efficient A* Algorithm for Robot Path Planning", ScienceDirect, 2016
5. Solidworks 2014
6. Claudiu Popirlan and Mihai Dupac, "An Optimal Path Algorithm for Autonomous Searching Robots", Annals of University of Craiova, Math. Comp. Sci. Ser., Volume 36(1), 2009
Impactof MMOD on Spaceships:
Spacecraftin low earth orbit (LEO) experience a variety of hazards includingexposure to micrometeoroids and orbital debris (MMOD). Average impactspeeds for orbital debris on spacecraft in LEO are 9 to 10 km/s, and20 km/s for micrometeoroids. Due to their high speeds, MMOD can causeconsiderable impact damage to sensitive spacecraft surfaces such aswindows, structural elements, electronic boxes, solar arrays,radiators, thermal protection system (TPS) materials coveringcrew/cargo return vehicles, as well as crew modules. Prolongedexposure to the on-orbit MMOD environment can potentially compromisethe TPS covering return vehicles such as the future crewed vehiclesexpected to visit and remain for a half-year or longer at theInternational Space Station (ISS). However, determination of MMODimpact damage to the TPS on crew/cargo return vehicles, or damage toother orbiting spacecraft currently requires visual inspection.
Withan estimated more than 100 million pieces of orbital debris measuringsmaller than one centimeter currently in Earth’s orbit, they can betoo small to track, but many are large enough to cause damage tooperational spacecraft. Objects larger than 3 mm are monitored fromthe ground.
Orbitaldebris as small as .3mm may pose a danger to human spaceflight androbotic missions. “Debris this small has the potential to damageexposed thermal protection systems, spacesuits, windows andunshielded sensitive equipment,”
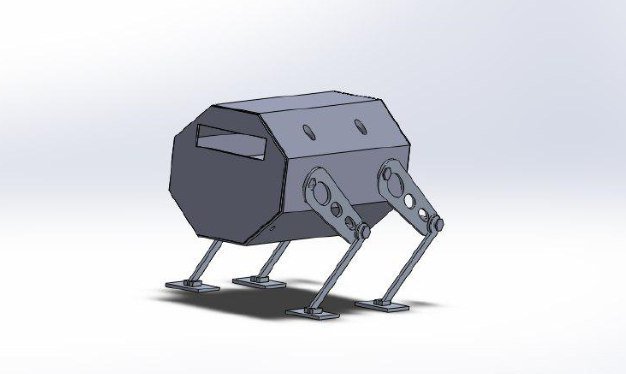
Designby Nature (Buckbeak Robot):
- Design a robot that simulatesthe “Gecko combined with dog” to create a trajectory of afree-flyer.
- The robot design is inspiredby nature, mimicking the adhesion of theGecko , the pacing of thedog and the transportation way of the mouse.
Write a programfor this trajectory with Python.
Decide on the shape of thefree-flyer, its energy source, and its technique for inspecting thesurface of the spacecraft including the signal type and its sensors(Including proximity sensors and edge sensors).
A detailedapplicable design protocol of the building blocks of the free-flyerand its theory of operation: how it maintains its autonomy, whattypes of signals it uses and how they are processed, how itmaintains its safety and sustainability, etc. - Model a design of the robotwith SolidWorks.
What will our idea change:
- Save crew time.
- Achievable autonomyalgorithm.
- Easier to further developdue to the GoPiGo front-end interface.
Theobjective of the solution:
- Detect the impact of the MMODon the body of the spaceship; so that we can avoid futurecatastrophes due to the resulting damage.
- Saves time and spares lots ofefforts; thanks to the robot autonomy.
- Simplify the control of therobot; because of the uncomplicated Python coding.
Componentsof the robot:
- Proximity Sensor:
A proximity sensor is anelectronic sensor that can detect the presence of objects within itsvicinity without any actual physical contact. In order to senseobjects, the proximity sensor radiates or emits a beam ofelectromagnetic radiation, usually in the form of infrared light, andsenses the reflection in order to determine the object's proximity ordistance from the sensor.
two sensors are needed for the robotdesign.
Type:CapacitiveSensors:Detection of metallic and non-metallic objects (Liquids, plastics,woods).
- RaspberryPi Camera:
Thecamera is adjustable one that is headed down to inspect thespacecraft body surface. The camera is adjacentto a proximity sensor, also there's another proximity sensorlocalized below it. Oncethe proximity sensor detects and impact; it turns the camera on. Thisway, the camera provides detailed information about the crack and itsposition.
- Basematerial :
Aluminium2018 Alloy
Advantages:
- Heattreatable wrought alloy.
- It is ahigh strength, age hardening, forging alloy.
- Copperis the chief alloying element.
- Externalbody:
Aluminium3003 Alloy
Advantages:
- Light.
- Highductility and corrosion resistance.
- Moderatestrength and good corrosion resistance.
- Thestrength of this alloy can be increased by cold working.
- Widelyused in space.
- gavebetter peroformance than other candidiates in MMOD hypervelocityimpact testing performed in Johnson Space Center.
- GoPiGo3Board:
TheGoPiGo3 is stacked with the Raspberry Pi withoutthe need for any other connections.
All themotor control and sensor I/O on the GoPiGo is done by an ATMEGA328microcontroller on the GoPiGo. The microcontroller acts as aninterpreter between the Raspberry Pi and the GoPiGo. It sends,receives, and executes commands sent by the RaspberryPi. Shortly, theGoPiGo3 board controls the body, sensors and motors all over therobot.
- EDIMAX- Wireless Adapters:
Establishesa Wi-Fi connection between the space shuttle and the robot. It uses alocal network.
- IRSensor:
Itprovides a wider angle for detection. Two sensors are needed for therobot design.
- Servomotor:
Thirteenmotors are needed for the robot design.
Type:MG995 – Torque 13.5 Kg.Cm, 0.16/60 degrees.
- Batteries:
3.7-kilowatt-hour lithium-ionbattery pack.
- Legs:
Adhesive legs made ofPolydimethylsiloxane(PDMS), fabricatedat Stanford Nanofabrication Facility.
Codes:
(1)
"""Extended Kalman Filter (EKF) Localization Sample Code.
Kalman filtering, also known as linear quadratic estimation (LQE), is an algorithm that uses a series of measurements observed over time, containing statistical noise and other inaccuracies, and produces estimates of unknown variables that tend to be more accurate than those based on a single measurement alone, by estimating a joint probability distribution over the variables for each timeframe"""
import numpy as np
import math
import matplotlib.pyplot as plt
# Estimation parameter of EKF
Q = np.diag([0.1, 0.1, math.radians(1.0), 1.0])**2
R = np.diag([1.0, math.radians(40.0)])**2
# Simulation parameter
Qsim = np.diag([0.5, 0.5])**2
Rsim = np.diag([1.0, math.radians(30.0)])**2
DT = 0.1 # time tick [s]
SIM_TIME = 50.0 # simulation time [s]
show_animation = True
def calc_input():
v = 1.0 # [m/s]
yawrate = 0.1 # [rad/s]
u = np.matrix([v, yawrate]).T
return u
def observation(xTrue, xd, u):
xTrue = motion_model(xTrue, u)
# add noise to gps x-y
zx = xTrue[0, 0] + np.random.randn() * Qsim[0, 0]
zy = xTrue[1, 0] + np.random.randn() * Qsim[1, 1]
z = np.matrix([zx, zy])
# add noise to input
ud1 = u[0, 0] + np.random.randn() * Rsim[0, 0]
ud2 = u[1, 0] + np.random.randn() * Rsim[1, 1]
ud = np.matrix([ud1, ud2]).T
xd = motion_model(xd, ud)
return xTrue, z, xd, ud
def motion_model(x, u):
F = np.matrix([[1.0, 0, 0, 0],
[0, 1.0, 0, 0],
[0, 0, 1.0, 0],
[0, 0, 0, 0]])
B = np.matrix([[DT * math.cos(x[2, 0]), 0],
[DT * math.sin(x[2, 0]), 0],
[0.0, DT],
[1.0, 0.0]])
x = F * x + B * u
return x
def observation_model(x):
# Observation Model
H = np.matrix([
[1, 0, 0, 0],
[0, 1, 0, 0]
])
z = H * x
return z
def jacobF(x, u):
"""
Jacobian of Motion Model
motion model
x_{t+1} = x_t+v*dt*cos(yaw)
y_{t+1} = y_t+v*dt*sin(yaw)
yaw_{t+1} = yaw_t+omega*dt
v_{t+1} = v{t}
so
dx/dyaw = -v*dt*sin(yaw)
dx/dv = dt*cos(yaw)
dy/dyaw = v*dt*cos(yaw)
dy/dv = dt*sin(yaw)
"""
yaw = x[2, 0]
v = u[0, 0]
jF = np.matrix([
[1.0, 0.0, -DT * v * math.sin(yaw), DT * math.cos(yaw)],
[0.0, 1.0, DT * v * math.cos(yaw), DT * math.sin(yaw)],
[0.0, 0.0, 1.0, 0.0],
[0.0, 0.0, 0.0, 1.0]])
return jF
def jacobH(x):
# Jacobian of Observation Model
jH = np.matrix([
[1, 0, 0, 0],
[0, 1, 0, 0]
])
return jH
def ekf_estimation(xEst, PEst, z, u):
# Predict
xPred = motion_model(xEst, u)
jF = jacobF(xPred, u)
PPred = jF * PEst * jF.T + Q
# Update
jH = jacobH(xPred)
zPred = observation_model(xPred)
y = z.T - zPred
S = jH * PPred * jH.T + R
K = PPred * jH.T * np.linalg.inv(S)
xEst = xPred + K * y
PEst = (np.eye(len(xEst)) - K * jH) * PPred
return xEst, PEst
def plot_covariance_ellipse(xEst, PEst):
Pxy = PEst[0:2, 0:2]
eigval, eigvec = np.linalg.eig(Pxy)
if eigval[0] >= eigval[1]:
bigind = 0
smallind = 1
else:
bigind = 1
smallind = 0
t = np.arange(0, 2 * math.pi + 0.1, 0.1)
a = math.sqrt(eigval[bigind])
b = math.sqrt(eigval[smallind])
x = [a * math.cos(it) for it in t]
y = [b * math.sin(it) for it in t]
angle = math.atan2(eigvec[bigind, 1], eigvec[bigind, 0])
R = np.matrix([[math.cos(angle), math.sin(angle)],
[-math.sin(angle), math.cos(angle)]])
fx = R * np.matrix([x, y])
px = np.array(fx[0, :] + xEst[0, 0]).flatten()
py = np.array(fx[1, :] + xEst[1, 0]).flatten()
plt.plot(px, py, "--r")
def main():
print(__file__ + " start!!")
time = 0.0
# State Vector [x y yaw v]'
xEst = np.matrix(np.zeros((4, 1)))
xTrue = np.matrix(np.zeros((4, 1)))
PEst = np.eye(4)
xDR = np.matrix(np.zeros((4, 1))) # Dead reckoning
# history
hxEst = xEst
hxTrue = xTrue
hxDR = xTrue
hz = np.zeros((1, 2))
while SIM_TIME >= time:
time += DT
u = calc_input()
xTrue, z, xDR, ud = observation(xTrue, xDR, u)
xEst, PEst = ekf_estimation(xEst, PEst, z, ud)
# store data history
hxEst = np.hstack((hxEst, xEst))
hxDR = np.hstack((hxDR, xDR))
hxTrue = np.hstack((hxTrue, xTrue))
hz = np.vstack((hz, z))
if show_animation:
plt.cla()
plt.plot(hz[:, 0], hz[:, 1], ".g")
plt.plot(np.array(hxTrue[0, :]).flatten(),
np.array(hxTrue[1, :]).flatten(), "-b")
plt.plot(np.array(hxDR[0, :]).flatten(),
np.array(hxDR[1, :]).flatten(), "-k")
plt.plot(np.array(hxEst[0, :]).flatten(),
np.array(hxEst[1, :]).flatten(), "-r")
plot_covariance_ellipse(xEst, PEst)
plt.axis("equal")
plt.grid(True)
plt.pause(0.001)
if __name__ == '__main__':
main()
(2)
"""2D Gaussian Grid Map Sample Code.
As the robot is small-sized reltive to the spacecraft's surface, it can view it as a 2D. A more efficient approach, however, would be to make a spacecraft-specific 3D grid map. Because this is just a proof-of-concept code, we chose to model a perfect 2D surface. Yet, this model, as it is, makes the robot most perfect for sufficiently large space structures."""
import math
import numpy as np
import matplotlib.pyplot as plt
from scipy.stats import norm
EXTEND_AREA = 10.0 # [m] grid map extention length
show_animation = True
def generate_gaussian_grid_map(ox, oy, xyreso, std):
minx, miny, maxx, maxy, xw, yw = calc_grid_map_config(ox, oy, xyreso)
gmap = [[0.0 for i in range(yw)] for i in range(xw)]
for ix in range(xw):
for iy in range(yw):
x = ix * xyreso + minx
y = iy * xyreso + miny
# Search minimum distance
mindis = float("inf")
for (iox, ioy) in zip(ox, oy):
d = math.sqrt((iox - x)**2 + (ioy - y)**2)
if mindis >= d:
mindis = d
pdf = (1.0 - norm.cdf(mindis, 0.0, std))
gmap[ix][iy] = pdf
return gmap, minx, maxx, miny, maxy
def calc_grid_map_config(ox, oy, xyreso):
minx = round(min(ox) - EXTEND_AREA / 2.0)
miny = round(min(oy) - EXTEND_AREA / 2.0)
maxx = round(max(ox) + EXTEND_AREA / 2.0)
maxy = round(max(oy) + EXTEND_AREA / 2.0)
xw = int(round((maxx - minx) / xyreso))
yw = int(round((maxy - miny) / xyreso))
return minx, miny, maxx, maxy, xw, yw
def draw_heatmap(data, minx, maxx, miny, maxy, xyreso):
x, y = np.mgrid[slice(minx - xyreso / 2.0, maxx + xyreso / 2.0, xyreso),
slice(miny - xyreso / 2.0, maxy + xyreso / 2.0, xyreso)]
plt.pcolor(x, y, data, vmax=1.0, cmap=plt.cm.Blues)
plt.axis("equal")
def main():
print(__file__ + " start!!")
xyreso = 0.5 # xy grid resolution
STD = 5.0 # standard diviation for gaussian distribution
for i in range(5):
ox = (np.random.rand(4) - 0.5) * 10.0
oy = (np.random.rand(4) - 0.5) * 10.0
gmap, minx, maxx, miny, maxy = generate_gaussian_grid_map(
ox, oy, xyreso, STD)
if show_animation:
plt.cla()
draw_heatmap(gmap, minx, maxx, miny, maxy, xyreso)
plt.plot(ox, oy, "xr")
plt.plot(0.0, 0.0, "ob")
plt.pause(1.0)
if __name__ == '__main__':
main()
(3)
"""Sample Code: A* Algorithm for Path Planning.
We chose A* algorithm becuase it is the most accurate although it does not necessarily generate the optimal path, but in our application we want the robot to walk as much as possible, and trace his path accurately."""
import matplotlib.pyplot as plt
import math
show_animation = True
class Node:
def __init__(self, x, y, cost, pind):
self.x = x
self.y = y
self.cost = cost
self.pind = pind
def __str__(self):
return str(self.x) + "," + str(self.y) + "," + str(self.cost) + "," + str(self.pind)
def calc_fianl_path(ngoal, closedset, reso):
# generate final course
rx, ry = [ngoal.x * reso], [ngoal.y * reso]
pind = ngoal.pind
while pind != -1:
n = closedset[pind]
rx.append(n.x * reso)
ry.append(n.y * reso)
pind = n.pind
return rx, ry
def a_star_planning(sx, sy, gx, gy, ox, oy, reso, rr):
"""
gx: goal x position [m]
gx: goal x position [m]
ox: x position list of Obstacles [m]
oy: y position list of Obstacles [m]
reso: grid resolution [m]
rr: robot radius[m]
"""
nstart = Node(round(sx / reso), round(sy / reso), 0.0, -1)
ngoal = Node(round(gx / reso), round(gy / reso), 0.0, -1)
ox = [iox / reso for iox in ox]
oy = [ioy / reso for ioy in oy]
obmap, minx, miny, maxx, maxy, xw, yw = calc_obstacle_map(ox, oy, reso, rr)
motion = get_motion_model()
openset, closedset = dict(), dict()
openset[calc_index(nstart, xw, minx, miny)] = nstart
while 1:
c_id = min(
openset, key=lambda o: openset[o].cost + calc_heuristic(ngoal, openset[o]))
current = openset[c_id]
# show graph
if show_animation:
plt.plot(current.x * reso, current.y * reso, "xc")
if len(closedset.keys()) % 10 == 0:
plt.pause(0.001)
if current.x == ngoal.x and current.y == ngoal.y:
print("Find goal")
ngoal.pind = current.pind
ngoal.cost = current.cost
break
# Remove the item from the open set
del openset[c_id]
# Add it to the closed set
closedset[c_id] = current
# expand search grid based on motion model
for i in range(len(motion)):
node = Node(current.x + motion[i][0],
current.y + motion[i][1],
current.cost + motion[i][2], c_id)
n_id = calc_index(node, xw, minx, miny)
if n_id in closedset:
continue
if not verify_node(node, obmap, minx, miny, maxx, maxy):
continue
if n_id not in openset:
openset[n_id] = node # Discover a new node
else:
if openset[n_id].cost >= node.cost:
# This path is the best until now. record it!
openset[n_id] = node
rx, ry = calc_fianl_path(ngoal, closedset, reso)
return rx, ry
def calc_heuristic(n1, n2):
w = 1.0 # weight of heuristic
d = w * math.sqrt((n1.x - n2.x)**2 + (n1.y - n2.y)**2)
return d
def verify_node(node, obmap, minx, miny, maxx, maxy):
if node.x < minx:
return False
elif node.y < miny:
return False
elif node.x >= maxx:
return False
elif node.y >= maxy:
return False
if obmap[node.x][node.y]:
return False
return True
def calc_obstacle_map(ox, oy, reso, vr):
minx = round(min(ox))
miny = round(min(oy))
maxx = round(max(ox))
maxy = round(max(oy))
# print("minx:", minx)
# print("miny:", miny)
# print("maxx:", maxx)
# print("maxy:", maxy)
xwidth = round(maxx - minx)
ywidth = round(maxy - miny)
# print("xwidth:", xwidth)
# print("ywidth:", ywidth)
# obstacle map generation
obmap = [[False for i in range(xwidth)] for i in range(ywidth)]
for ix in range(xwidth):
x = ix + minx
for iy in range(ywidth):
y = iy + miny
# print(x, y)
for iox, ioy in zip(ox, oy):
d = math.sqrt((iox - x)**2 + (ioy - y)**2)
if d <= vr / reso:
obmap[ix][iy] = True
break
return obmap, minx, miny, maxx, maxy, xwidth, ywidth
def calc_index(node, xwidth, xmin, ymin):
return (node.y - ymin) * xwidth + (node.x - xmin)
def get_motion_model():
# dx, dy, cost
motion = [[1, 0, 1],
[0, 1, 1],
[-1, 0, 1],
[0, -1, 1],
[-1, -1, math.sqrt(2)],
[-1, 1, math.sqrt(2)],
[1, -1, math.sqrt(2)],
[1, 1, math.sqrt(2)]]
return motion
def main():
print(__file__ + " start!!")
# start and goal position
sx = 10.0 # [m]
sy = 10.0 # [m]
gx = 50.0 # [m]
gy = 50.0 # [m]
grid_size = 1.0 # [m]
robot_size = 1.0 # [m]
ox, oy = [], []
for i in range(60):
ox.append(i)
oy.append(0.0)
for i in range(60):
ox.append(60.0)
oy.append(i)
for i in range(61):
ox.append(i)
oy.append(60.0)
for i in range(61):
ox.append(0.0)
oy.append(i)
for i in range(40):
ox.append(20.0)
oy.append(i)
for i in range(40):
ox.append(40.0)
oy.append(60.0 - i)
if show_animation:
plt.plot(ox, oy, ".k")
plt.plot(sx, sy, "xr")
plt.plot(gx, gy, "xb")
plt.grid(True)
plt.axis("equal")
rx, ry = a_star_planning(sx, sy, gx, gy, ox, oy, grid_size, robot_size)
if show_animation:
plt.plot(rx, ry, "-r")
plt.show()
if __name__ == '__main__':
main()
(4)
"""This is a sample path tracking code."""
import matplotlib.pyplot as plt
import numpy as np
from random import random
# simulation parameters
Kp_rho = 9
Kp_alpha = 15
Kp_beta = -3
dt = 0.01
show_animation = True
def move_to_pose(x_start, y_start, theta_start, x_goal, y_goal, theta_goal):
"""
rho is the distance between the robot and the goal position
alpha is the angle to the goal relative to the heading of the robot
beta is the angle between the robot's position and the goal position plus the goal angle
Kp_rho*rho and Kp_alpha*alpha drive the robot along a line towards the goal
Kp_beta*beta rotates the line so that it is parallel to the goal angle
"""
x = x_start
y = y_start
theta = theta_start
x_diff = x_goal - x
y_diff = y_goal - y
x_traj, y_traj = [], []
rho = np.sqrt(x_diff**2 + y_diff**2)
while rho > 0.001:
x_traj.append(x)
y_traj.append(y)
x_diff = x_goal - x
y_diff = y_goal - y
"""
Restrict alpha and beta (angle differences) to the range
[-pi, pi] to prevent unstable behavior, which is more suitble for the adhesive
"""
rho = np.sqrt(x_diff**2 + y_diff**2)
alpha = (np.arctan2(y_diff, x_diff) -
theta + np.pi) % (2 * np.pi) - np.pi
beta = (theta_goal - theta - alpha + np.pi) % (2 * np.pi) - np.pi
v = Kp_rho * rho
w = Kp_alpha * alpha + Kp_beta * beta
if alpha > np.pi / 2 or alpha < -np.pi / 2:
v = -v
theta = theta + w * dt
x = x + v * np.cos(theta) * dt
y = y + v * np.sin(theta) * dt
if show_animation:
plt.cla()
plt.arrow(x_start, y_start, np.cos(theta_start),
np.sin(theta_start), color='r', width=0.1)
plt.arrow(x_goal, y_goal, np.cos(theta_goal),
np.sin(theta_goal), color='g', width=0.1)
plot_vehicle(x, y, theta, x_traj, y_traj)
def plot_vehicle(x, y, theta, x_traj, y_traj):
# Corners of triangular vehicle when pointing to the right (0 radians)
p1_i = np.array([0.5, 0, 1]).T
p2_i = np.array([-0.5, 0.25, 1]).T
p3_i = np.array([-0.5, -0.25, 1]).T
T = transformation_matrix(x, y, theta)
p1 = np.matmul(T, p1_i)
p2 = np.matmul(T, p2_i)
p3 = np.matmul(T, p3_i)
plt.plot([p1[0], p2[0]], [p1[1], p2[1]], 'k-')
plt.plot([p2[0], p3[0]], [p2[1], p3[1]], 'k-')
plt.plot([p3[0], p1[0]], [p3[1], p1[1]], 'k-')
plt.plot(x_traj, y_traj, 'b--')
plt.xlim(0, 20)
plt.ylim(0, 20)
plt.pause(dt)
def transformation_matrix(x, y, theta):
return np.array([
[np.cos(theta), -np.sin(theta), x],
[np.sin(theta), np.cos(theta), y],
[0, 0, 1]
])
def main():
for i in range(5):
x_start = 20 * random()
y_start = 20 * random()
theta_start = 2 * np.pi * random() - np.pi
x_goal = 20 * random()
y_goal = 20 * random()
theta_goal = 2 * np.pi * random() - np.pi
print("Initial x: %.2f m\nInitial y: %.2f m\nInitial theta: %.2f rad\n" %
(x_start, y_start, theta_start))
print("Goal x: %.2f m\nGoal y: %.2f m\nGoal theta: %.2f rad\n" %
(x_goal, y_goal, theta_goal))
move_to_pose(x_start, y_start, theta_start, x_goal, y_goal, theta_goal)
if __name__ == '__main__':
main()
(5)
"""Sample code for the sensing mechanism. This code is incomplete because it assumes the existence of a predefined function report_position() and a variable named camera that is 0 when the camera is off and 1 when on.
The GoPiGo board has built-in modules to establish a WiFi connection between the controller computer and the robot, and built-in modules for camera configuration and signal processing, even if the camera is not a GoPiGo camera. All we need to do is to connect a WiFi adaptor to the robot. That's why we haven't included signal-processing code."""
import gopigpo
import time
if detected_distance >= sensor_height:
report_position()
gopigp.bwd(1) # [m]
if camera == 0:
camera == 1
time.sleep(10) # [s]
(6)
import RPi.GPIO as gpio
import time
gpio.setmode(gpio.BOARD)
gpio.setup(7, gpio.OUT)
gpio.setup(11, gpio.OUT)
gpio.setup(13, gpio.OUT)
gpio.setup(15, gpio.OUT)
gpio.output(7, True)
gpio.output(11, True)
gpio.output(13, True)
gpio.output(15, False)
time.sleep(0.5)
gpio.cleanup()
(7)
from gopigo import *
import time
import random
min_distance = 70 # [cm]
def autonomy():
no_problem = True
while no_problem:
servo(70)
time.sleep(1) # [s]
dist = us_dist(15)
if dist > min_distance:
print('Forward is fine with me', dist)
fwd()
time.sleep(1)
else:
print('Stuff is in the way', dist)
stop()
servo(28)
time.sleep(1)
left_dir = us_dist(15)
time.sleep(1)
servo(112)
right_dir = us_dist(15)
time.sleep(1)
if left_dir > right_dir and left_dir > min_distance:
print('Choose left!')
left()
time.sleep(1)
elif left_dir < right_dir and right_dir > min_distance:
print('Choose Right!')
right()
time.sleep(1)
else:
print('No good option, REVERSE!')
bwd()
time.sleep(2)
rot_choices = [right_rot, left_rot]
rotation = rot_choices[random.randrange(0,2)]
rotation()
time.sleep(1)
stop()
stop()
enable_servo()
servo(70)
time.sleep(3)
autonomy()

SpaceApps is a NASA incubator innovation program.