


Gamma 4 | Design by Nature
The Challenge | Design by Nature
MOBLY SYSTEM
Detection system for surface MMOD damage of a shuttle
MOBLY SYSTEM - Detection system for space debris damage
The MOBLY system is designed on a shuttle specifically used for long distance return missions.
HOW OUR PROBE MOVES FREELY AROUND THE SHUTTLE
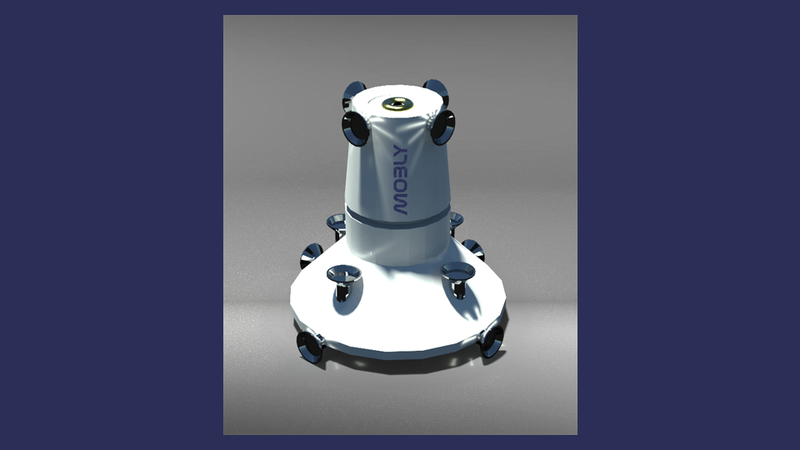
Picture of our probe:
https://drive.google.com/file/d/14xWvS08pAV0DVdSj7...
The probe uses centripetal force as the base of the movement idea. The shuttle will have a tube that is on the inside but close to the surface of the shuttle so the places where the probe will be launched from can be opened. This tube is completely separated from the inside of the spaceship, and the only openings are possible on the surface of the shuttle.
How our probe will move around the shuttle:
https://drive.google.com/file/d/17UYbeXtDQZbyiOg1N...
The probe is launched from the top of the shuttle, and the probe then uses compressed gas thrusters so as to force a centripetal movement. While the centripetal movement is happening, the shuttle continues forward, and our probe relative to the shuttle goes backwards, so our probe covers the whole surface area before the time it gets behind the shuttle. So as to not lose it back in space, using specific calculations, we find the most final area we can use to connect our probe back inside the tube of the shuttle, then using magnets or any system that transports our probe to the starting point of the tube (that is at the most front possible part of the shuttle), from where we launch it again and repeat the process. Depending on the speeds, different angles could be used on the second and next tries to cover the whole surface area of the shuttle without gaps.
THE PROBE - MOBLY
The probe uses compressed gas tanks to make it move and rotate through space. It also has a high resolution camera or sensor so it can scan the surface. The scanned surface is then autonomously compared to a the reference 2D map (meaning 2D surface of the shuttle with no damage in it - how it should be) and finds the correlating coordinates of the x and y axis, the part that is most % similar. Then those two are compared and if by specific measures there is a difference in the picture that was taken with the probe, then we know that there is some kind of a defect in that region. Knowing the resolution of the 2D map of the referenced image, we can figure how large the defect is.
The hardware is powered by an accumulator that the crew inside can recharge.
The crew inside can also decide if they want to stop the probe from launching again through the transport tube.
The picture that showed defect is sent to the crew inside to analyse and deal with the damage.
Presentation: https://drive.google.com/file/d/12DRRIsG8Akkx1ZcQ3...
NATURE
We were inspired by the build of beehives by hexagon cells. Our referenced 2D mapping is designed by mapped cells but squares.

SpaceApps is a NASA incubator innovation program.