


Explorer | Design by Nature
Awards & Nominations
Explorer has received the following awards and nominations. Way to go!
The Challenge | Design by Nature
Swarm Scanner - A bio inspired Autonomous MMOD Damage Detector
Swarm Scanner - a swarm of robots: is inspired from biological systems such as colony of Ants/Bees or Flock of Birds, in which complex tasks are accomplished collectively by the colony, which is impossible when attempted at stand alone individual level.
Swarm Scanner, is a swarm robotics system with members of the swarm being cube shaped free flyer robots. This Robotics System is inspired from biological systems such as colony of Ants/Bees or Flock of Birds,
in which complex tasks are only accomplished by collectively by the colony which is impossible to accomplish when attempted at stand alone individual level.
The design consist of Autonomous Swarm Robotic System powered by Deep Reinforcement Learning engines for planning the flight around the Mother Spaceship for MMOD damage detection and quantification.
Computer vision Algorithms such as RESNet and other such CNN algorithms is used to detect and quantify damage. For this composite images along with other sensor data is used to segment out the damaged area.
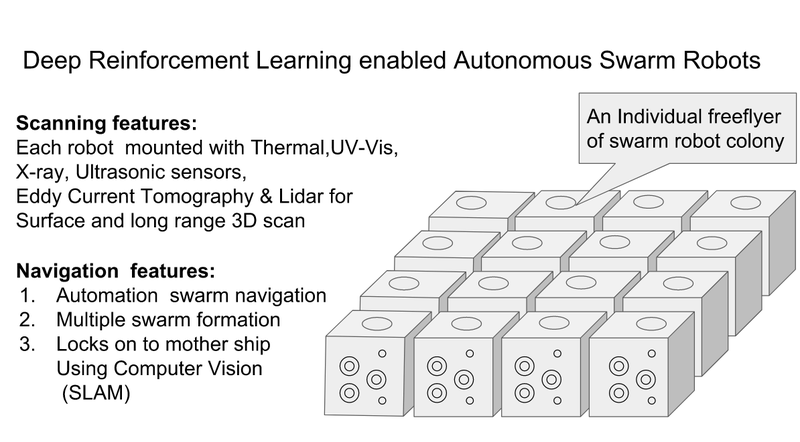
Scanning features:
Each robot is mounted with Thermal,UV-Vis, X-ray, Ultrasonic sensors, Eddy Current Tomography & LIDAR for Surface and long range 3D scan
Navigation features:
- Automation swarm navigation
- Multiple swarm formation: (a) Formation for closeup Surface Scans and (b) Formation for long range compound Computer Vision Scans for large damages.
- The Long Range Photogrammetry Scans are done for detection of large impacts and this is achieved by the individual robots flocking to form a cluster where the images are processed like in the the case of compound eyes of insects, only difference being that these are high resolution stereoscopic images from individual robots that are stitched together to generate high resolution 3D images.
- Short range scans are performed by individual robots by flying close to the surface of the spacecraft scanning for MMOD damage, in this mode the robots spread out across the Mother Spaceship. thorough Scans are performed at high risk areas based on Bumper Analysis probabilities.
- The free flier robots locks on to mother ship using Computer Vision (SLAM) and coordinated SWARM formations algorithms.
Computer vision : AI engines powered by latest Deep Learning Algorithms are used to detect MMOD damage, this is achieved by training with images collected from various other spacecrafts that has faced MMOD damage in the past.
Similarly Reinforcement Learning for Navigation, Flocking and execution of various other tasks in a coordinated and accurate manner is done by initiating / simulating are initiated before the space craft is launched. Reinforcement learning is optimized to efficient use of propellant (Cold Compressed Gas propellant for microthrusters of each of the Free Flyer Robot).
The Swarm robots are sent out for MMOD inspection in three scenarios.
1) Routine Planned Check inspection
2) Inspection triggered by detection of any kind of threats to the spacecraft.
3) Detection of anomalies such as as rapid Pressure drop, and other such events

SpaceApps is a NASA incubator innovation program.