


The Challenge | Design by Nature
Design an autonomous free-flyer to inspect a spacecraft for damage from Micro-Meteoroid and Orbital Debris (MMOD).
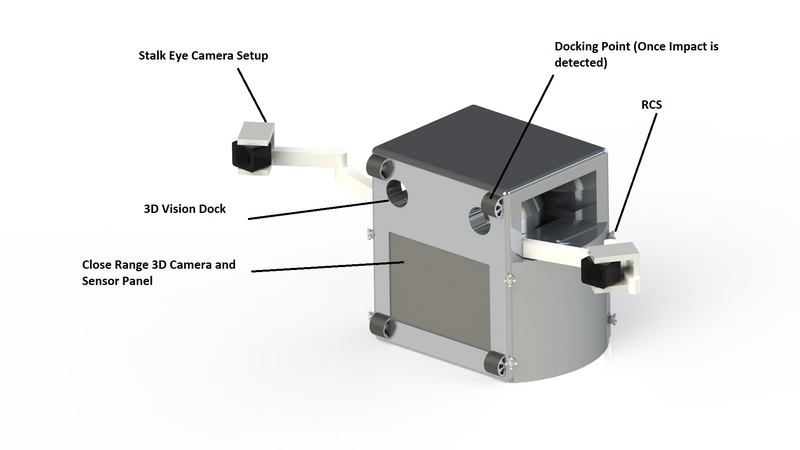
EA2
EA2 helps in detecting and obtaining 3D information about damages done by MMOD impacts
- Inspiration:
- The design is inspired by Stalk eyed insects. The concept is to have two cameras mounted on extended robotic arms rather than having multiple cameras with a fixed mount.
- The arms ,when not extended, hold the camera at a specific location which can be used for stereo vision.
- Propulsion :
- EA2 is propelled by cold gas thrusters. The proposed gas to be used is nitrogen.
- The reaction control system helps in maintaining the momentum and attitude
- Localiztion :
- EA2 will moved around the space craft and scan for damages by MMOD. The localization can be done by using Trilateration. Three antennas or beacons will be placed on the space craft. The relative distance from the three beacons will help in localizing the free flyer
- Crawling on the ship:
- EA2 first scans the ship from a distance using its two cameras mounted on a stalk eye setup. The two cameras and the extending robotic arm gives a wider coverage for scanning. The probable damage points are identified
- The second step is then initiated and EA2 moves closer to the impact point using the thrusters and makes contact with the space craft surface .
- The contact points are four wheels. These wheels along with the thrusters allow EA2 to crawl on the space craft body to get clear depth information about the damage. (Similar to Disney's Vertigo Robot)
Resources used :
https://www.nasa.gov/exploration/systems/orion/gal...

SpaceApps is a NASA incubator innovation program.