


ARACNE | Design by Nature
Team Updates
The previous points justify the benefits of the proposed idea, which are:
- The FF can be operated outside the safety sphere of the SC, hence resulting in a safe operation.
- Propellant consumption is minimized thanks to the CPU trajectory optimization.
- The system can be easily automated.
- The risk for astronauts is reduced, as inspection EVAs are no longer necessary.
- The overall system has a low weight and low energy consumption.
- Detection system adapts to the changes of the structure thanks to neural network retraining.
- Impact data can be used for scientific purposes in order to estimate the flux of micrometeoroids and space debris.
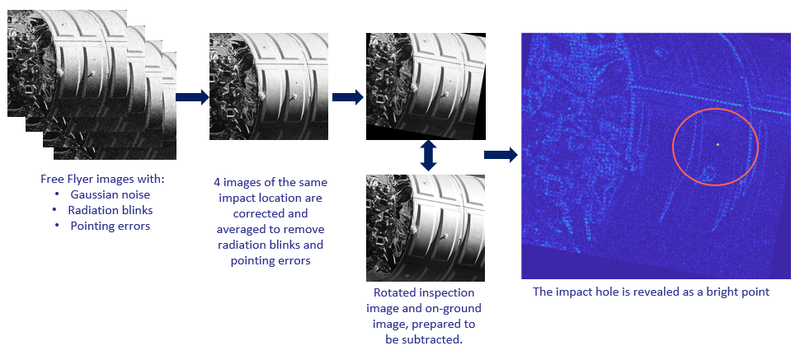
A record of the surface from the predetermined free flyer locations, either generated on-ground or at the beginning of the mission, is stored in the CPU. After some processing, the free flyer image is compared with its on-ground equivalent to determine the impact hole diameter. This procedure enhances fault-tolerance and robustness.
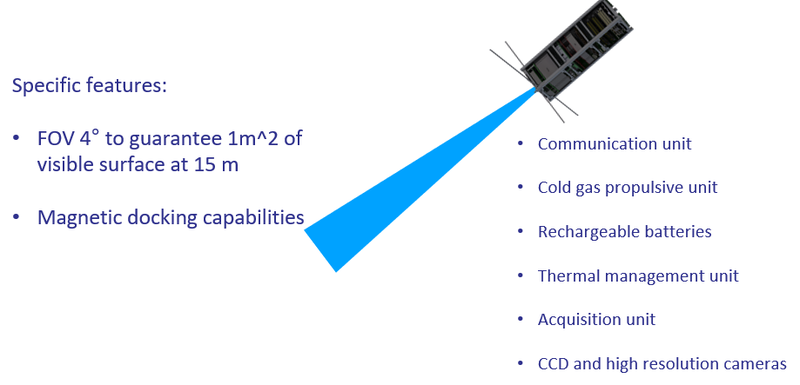
The great thing here is that, as we already know the impact locations, we can reduce the field of view of the free flyer camera and place it far away from the spacecraft surface, hence ensuring a safe operation! For observing the dark side of the spacecraft, we propose using CCD cameras and/or LED surface illumination. The free flyer docking procedure is simplified with magnetic docking devices.
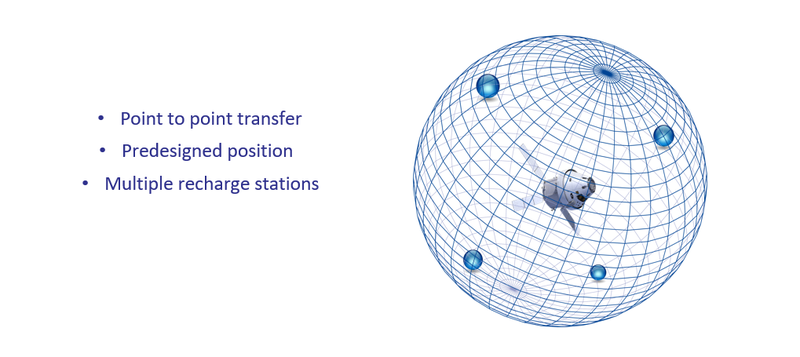
Once the detection system is defined, we should think about the inspection procedure. Our free flyer is stored over the surface of the SC, and when required goes to predetermined safe locations to perform the optical inspection. That minimum set of points ensures observability of the whole surface.
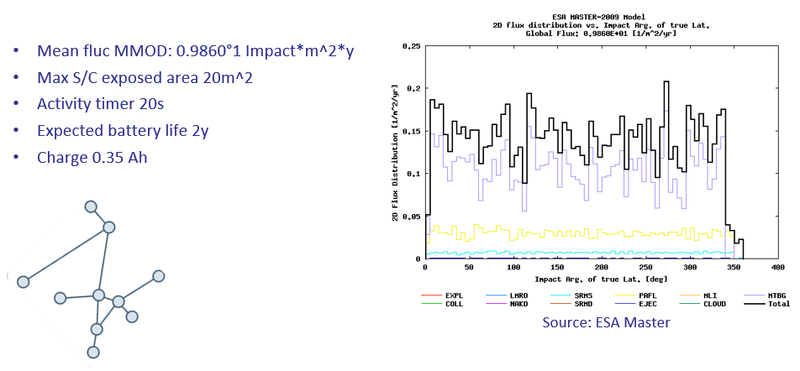
OK, so we have the idea. Is it possible to implement it? Using independent wireless sensors as the ones given in Ref. (1) and based on a debris flux of 9.8 impacts/m^2/yr (d=0.1-10 mm, ESA MASTER) for LEO orbit, we expect a battery life of 2 years with a charge of 0.35 Ah for each set of 4 sensors. The low consumption seems to ensure the feasibility of this kind of implementation.
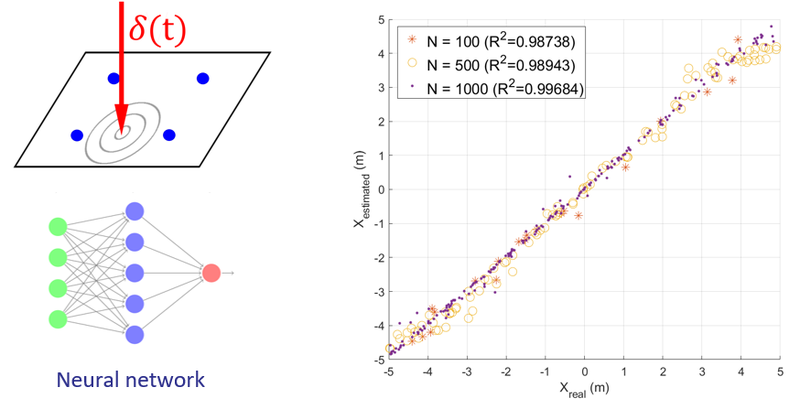
We actually were not so happy with the previous algorithm, because it only works for quasi-homogeneous structures. What if we tried to feed a Neural Network taking as input the results for a MonteCarlo simulation of impacts over a flat plate? Again, the result was astounding :D (N = number of simulated impacts) This may be a better approach for complex structures, like the ones of spacecrafts...
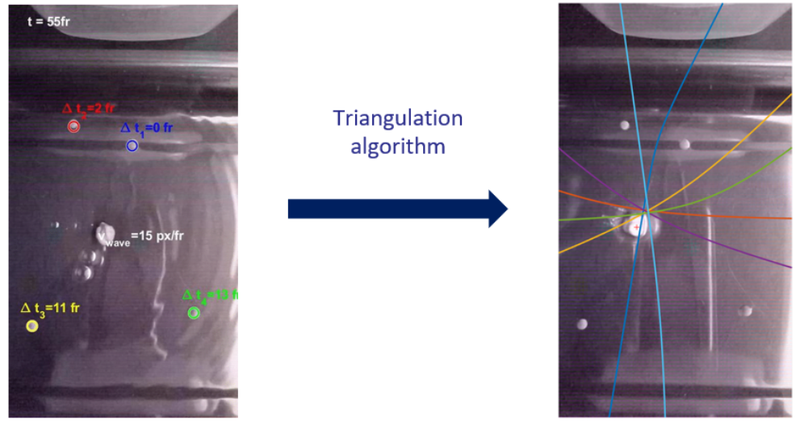
We wanted to test by ourselves the triangulation algorithms that we used for our detection system. Water waves are somehow analogous to space debris impact perturbations, so we just threw a chickpea over a water surface where we had placed 4 lentils. When the wave reached the lentils, we measured the arrival times. The algorithms predicted the impact position with a surprising accuracy!

SpaceApps is a NASA incubator innovation program.