


Salvum cars | Invent Your Own Challenge
Team Updates
| int a;int b;int d;int x=0;int y=0; | |
| void read1(){TMR1H = 0;TMR1L = 0; | |
| PORTa.F6 = 1;Delay_us(10);PORTa.F6 = 0; | |
| while(!PORTa.F7);T1CON.F0 = 1;while(PORTa.F7);T1CON.F0 = 0; | |
| a = (TMR1L | (TMR1H<<8));a = a/34;a = a + (a/5); | |
| if(a<11){a=a+1;}else a=a;} | |
| void read2(){TMR1H = 0;TMR1L = 0; | |
| PORTa.F1 = 1;Delay_us(10);PORTa.F1 = 0; | |
| while(!PORTa.F0);T1CON.F0 = 1;while(PORTa.F0);T1CON.F0 = 0; | |
| b = (TMR1L | (TMR1H<<8));b = b/34;b = b + (b/5); | |
| if(b<11){b=b+1;}else b=b;} | |
| void read3(){TMR1H = 0;TMR1L = 0; | |
| PORTa.F2 = 1;Delay_us(10);PORTa.F2 = 0; | |
| while(!PORTa.F3);T1CON.F0 = 1; while(PORTa.F3);T1CON.F0 = 0; | |
| d = (TMR1L | (TMR1H<<8));d = d/34;d = d + (d/5); if(d<11){d=d+1;}else d=d;} | |
| void main() | |
| { cmcon=7; T1CON = 0x10; TRISB = 0b00000000; TRISa = 0b10001001; porta=0; portb=0;delay_ms(100); | |
| loop: | |
| read2();x=b;delay_ms(200); read2();y=b; | |
| b=(x-y); | |
| if( b>=14){portb.f0=1;read1();read3(); | |
| if(a>=d){portb.f7=1;portb.f4=1;delay_ms(200);portb.f7=0;portb.f4=0;} | |
| if(d>=a){portb.f1=1;portb.f3=1;delay_ms(200);portb.f1=0;portb.f3=0;} | |
| } | |
| if( b<=10){portb.f0=0;} | |
| goto loop; | |
| } |
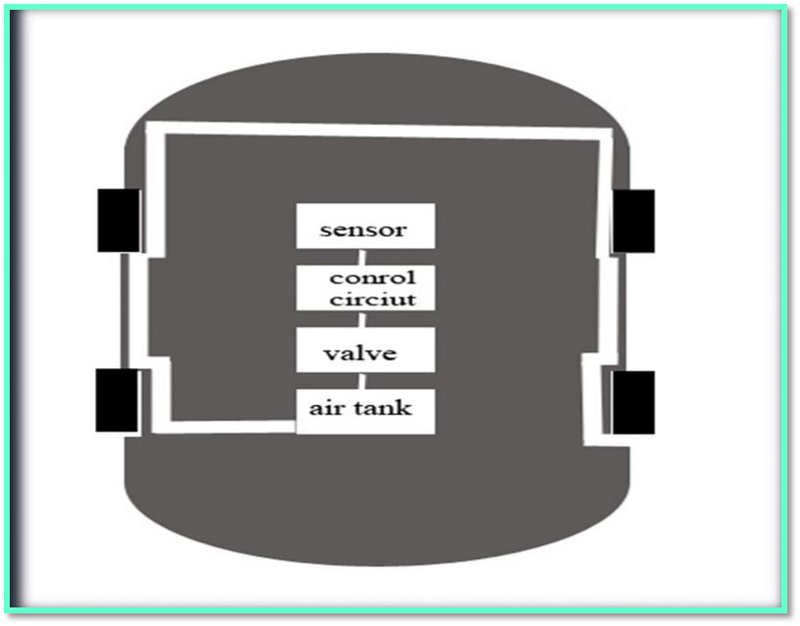
Floating system.
Automatic control system.
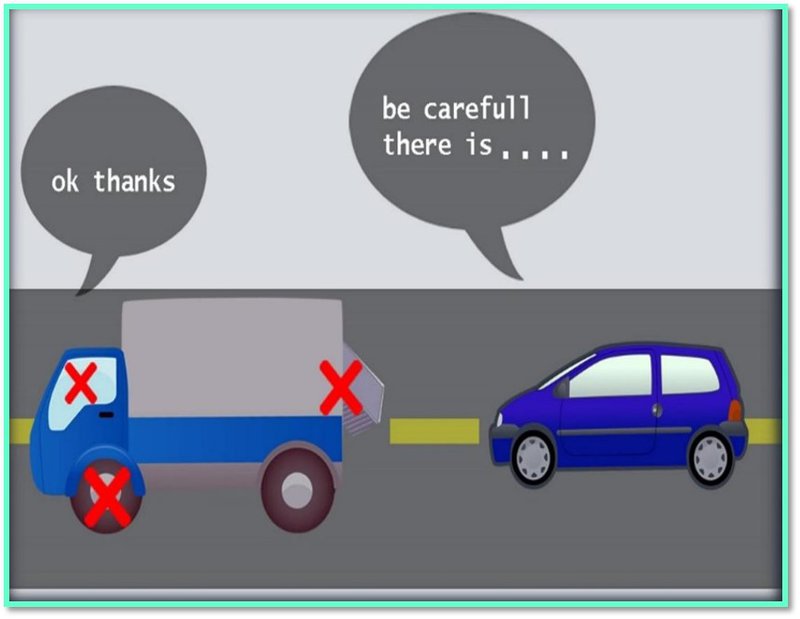
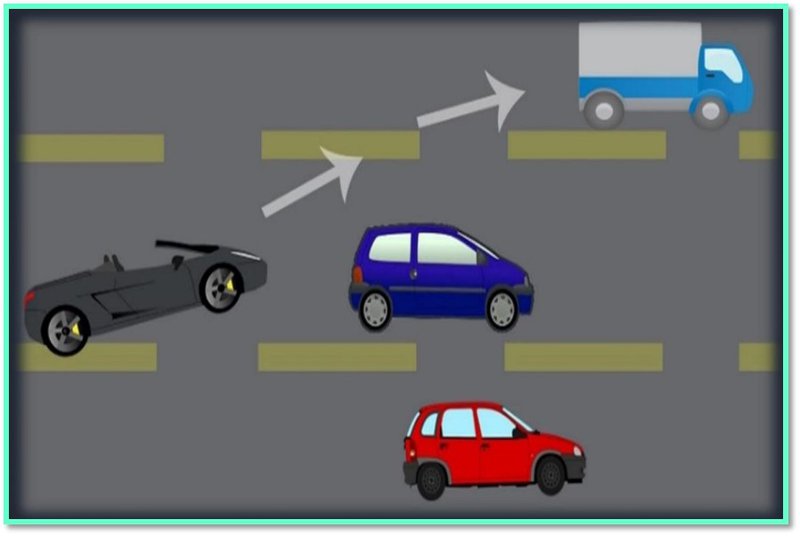
communication system.
Car speed system; An image of how we will control the speed of the car.
| // LCD module connections | |
| sbit LCD_RS at RB0_bit; | |
| sbit LCD_EN at RB1_bit; | |
| sbit LCD_D4 at RB2_bit; | |
| sbit LCD_D5 at RB3_bit; | |
| sbit LCD_D6 at RB4_bit; | |
| sbit LCD_D7 at RB5_bit; | |
| sbit LCD_RS_Direction at TRISB0_bit; | |
| sbit LCD_EN_Direction at TRISB1_bit; | |
| sbit LCD_D4_Direction at TRISB2_bit; | |
| sbit LCD_D5_Direction at TRISB3_bit; | |
| sbit LCD_D6_Direction at TRISB4_bit; | |
| sbit LCD_D7_Direction at TRISB5_bit; | |
| // End LCD module connections | |
| char hs; char duty1; char duty2;char x=0; | |
| void main() { | |
| adcon1=7; | |
| trisa=0b00111101;trisb=0b10000000;trisc=0b00000000;trisd=0b00000000; | |
| porta=0;portb=0;portc=0;portd=0; | |
| UART1_Init(9600); // Initialize UART module at 9600 bps | |
| Delay_ms(100); // Wait for UART module to stabilize | |
| PWM1_Init(5000); // Initialize PWModule at 5KHz | |
| PWM2_Init(5000); | |
| PWM1_Start(); // start PWM1 | |
| PWM2_Start(); // start PWM2 | |
| Lcd_Init(); // Initialize LCD | |
| Lcd_Cmd(_LCD_CLEAR); // Clear display | |
| Lcd_Cmd(_LCD_CURSOR_OFF); // Cursor off | |
| Lcd_Out(1,4,"salvum car"); | |
| Lcd_Out(2,3,"sama+haneen"); | |
| delay_ms(4000); | |
| Lcd_Cmd(_LCD_CLEAR); | |
| loop: | |
| if (UART1_Data_Ready()) {hs = UART1_Read();} | |
| if(hs==48){PWM1_Set_Duty(0);PWM2_Set_Duty(0);} | |
| if(hs==49){PWM1_Set_Duty(150);PWM2_Set_Duty(150);} | |
| if(hs==50){PWM1_Set_Duty(150);PWM2_Set_Duty(150);} | |
| if(hs==51){PWM1_Set_Duty(175);PWM2_Set_Duty(175);} | |
| if(hs==52){PWM1_Set_Duty(175);PWM2_Set_Duty(175);} | |
| if(hs==53){PWM1_Set_Duty(200);PWM2_Set_Duty(200);} | |
| if(hs==54){PWM1_Set_Duty(200);PWM2_Set_Duty(200);} | |
| if(hs==55){PWM1_Set_Duty(225);PWM2_Set_Duty(225);} | |
| if(hs==56){PWM1_Set_Duty(225);PWM2_Set_Duty(225);} | |
| if(hs==57){PWM1_Set_Duty(255);PWM2_Set_Duty(255);} | |
| if(hs=='q'){PWM1_Set_Duty(255);PWM2_Set_Duty(255);} | |
| if(hs=='F'){portd.f0=1;portd.f2=1; } | |
| if(hs=='B'){portd.f1=1;portd.f3=1; } | |
| if(hs=='R'){portd.f0=1;portd.f3=1; } | |
| if(hs=='L'){portd.f1=1;portd.f2=1; } | |
| if(hs=='S'){portd.f0=0;portd.f1=0;portd.f2=0;portd.f3=0;delay_ms(5); } | |
| if(hs=='W'){portd.f6=1;} | |
| if(hs=='w'){portd.f6=0;} | |
| if(hs=='U'){portd.f5=1;} | |
| if(hs=='u'){portd.f5=0;} | |
| if(hs=='V'){portd.f4=1;} | |
| if(hs=='v'){portd.f4=0;} | |
| if(hs=='o'){loop5: | |
| if(porta.f0==1){portd.f1=1;portd.f2=1;delay_ms(200);portd.f2=0;portd.f1=0;delay_ms(200);} | |
| if(portb.f7==1){portd.f0=1;portd.f3=1;delay_ms(200);portd.f0=0;portd.f3=0;delay_ms(200);} | |
| if (UART1_Data_Ready()) {hs = UART1_Read();} | |
| if(hs=='y'){goto loop;} | |
| goto loop5; | |
| } | |
| if(hs=='X'){while(porta.f2==0){PWM1_Set_Duty(255);PWM2_Set_Duty(255);portd.f0=1;portd.f2=1;} | |
| loop2: | |
| PWM1_Set_Duty(125);PWM2_Set_Duty(125); | |
| if (UART1_Data_Ready()) {hs = UART1_Read();} | |
| if(hs=='x') | |
| {portd.f0=0;portd.f1=0;portd.f2=0;portd.f3=0;delay_ms(5);PWM1_Set_Duty(255);PWM2_Set_Duty(255);delay_ms(200);goto loop; } | |
| goto loop2; | |
| } | |
| if(porta.f3==1){PWM1_Set_Duty(125);PWM2_Set_Duty(125); | |
| for(x=0;x<5;x++){portd.f4=1;portd.f5=1;portd.f6=1;delay_ms(150);portd.f4=0;portd.f5=0;portd.f6=0;delay_ms(150);} | |
| portd.f0=0;portd.f1=0;portd.f2=0;portd.f3=0;delay_ms(3000); | |
| PWM1_Set_Duty(255);PWM2_Set_Duty(255);} | |
| goto loop; | |
| } |

SpaceApps is a NASA incubator innovation program.