


BID Bomba de infusión contra la diabetes | Invent Your Own Challenge
Team Updates


Working with the video designer...

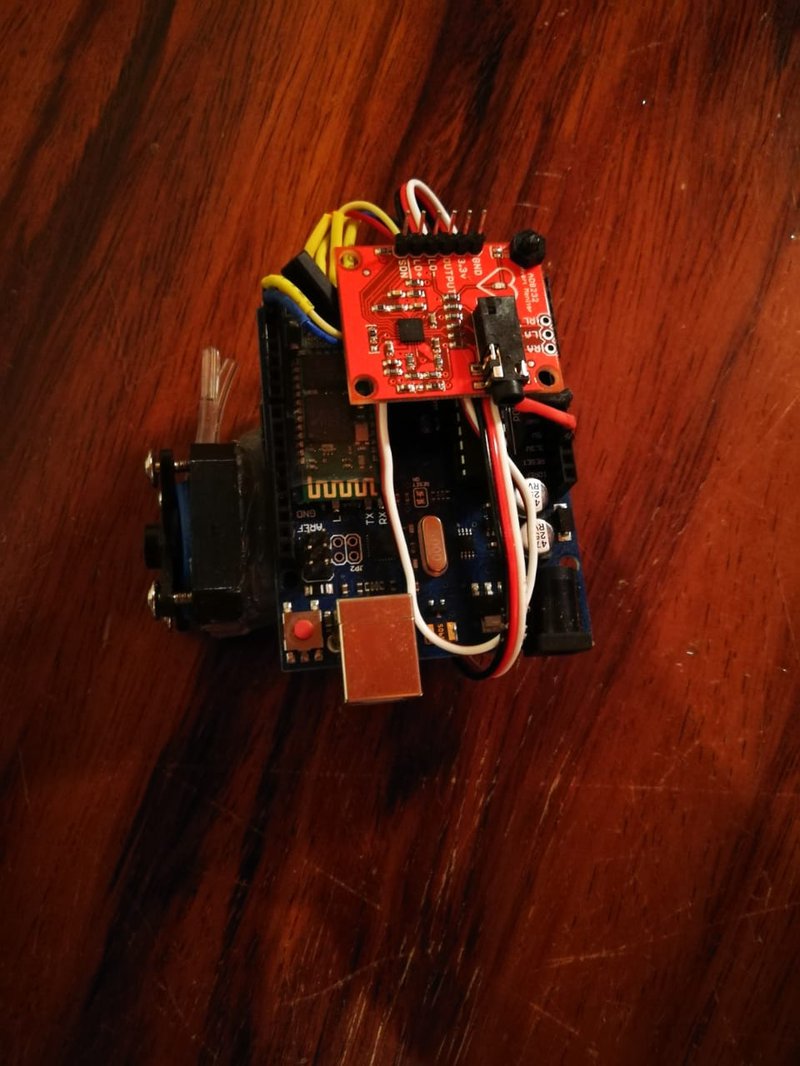
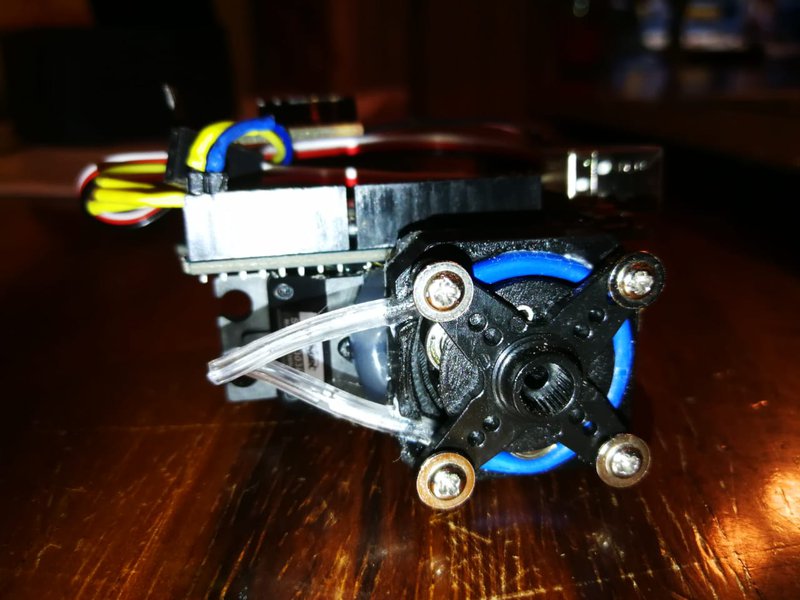
We started to mount the peristaltic pump.
//engine servo
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
int incomingByte = 0; // for incoming serial data
void setup() {
Serial.begin(9600);
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
// send data only when you receive data:
if (Serial.available() > 0) {
// read the incoming byte:
incomingByte = Serial.read();
// say what you got:
Serial.print("received: ");
Serial.print (incomingByte);
if(incomingByte == 108){
Serial.println(" sent 0 Rotaing CW ");
myservo.write(0);
}else if(incomingByte == 114){
Serial.println(" sent 180 Rotaing CCW ");
myservo.write(180);
}else if(incomingByte == 60){
Serial.println(" sent Stopped ");
myservo.write(60);
}else{
Serial.println(" moving Random");
myservo.write(incomingByte);
}
}
}
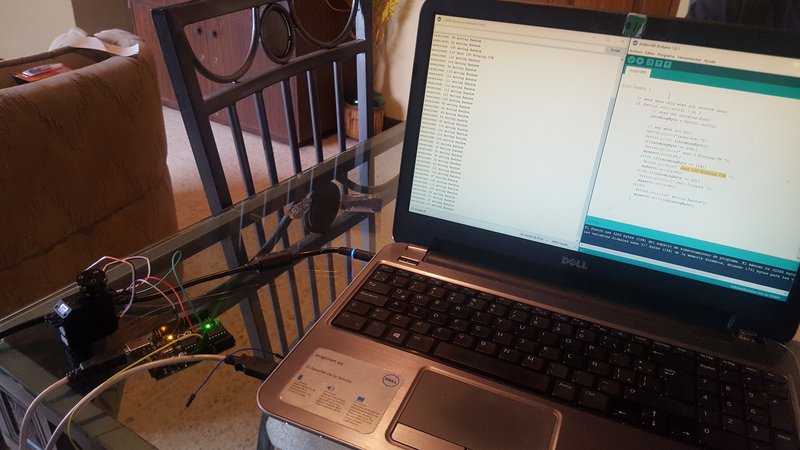
Configuring the 360° engine



SpaceApps is a NASA incubator innovation program.