


DeltaProtocol | Make Sense Out of Mars
Awards & Nominations
DeltaProtocol has received the following awards and nominations. Way to go!
The Challenge | Make Sense Out of Mars
DeltaMesh
DeltaMesh is a system that provides safety, control, and support. It is composed of sensors connected to a mesh network whose aim is to keep astronauts under observation, whilst also collecting biological and environmental data.

About us!

Section 1: What is Delta Mesh?
DeltaMesh is a system that provides safety, control, and support to the first astronauts to settle on Mars’s surface. It is composed of sensors connected to a mesh network. The aim of this network is to keep astronauts under observation when they move away from the base, whilst also collecting several other kinds of personal and environmental data.
In view of the lack of knowledge on the side effects of Mars’s atmospheric and gravitational conditions over astronauts’ bodies, it is of vital importance to collect and analyze data on certain biological parameters. These data will help humanity settle safely on Mars’s surface and expand their colonization while minimizing risk.
Our system consists of several devices that serve different purposes:
- A Mesh Network
- Remote Stations
- Mobile Stations
Our system also features an artificial intelligence assistant we dub “Wilson”.
Sections 2 and 3 detail the design and functionality of each of these components.
Section 2: Explaining the solution
2.1. The Mesh Network
The system will be based on a mesh network built following the LoRaWAN protocol. This protocol enables slow speed data transmission with a long range and low power consumption. The mesh network is designed to function as the backbone that will support the other parts of the sensors’ net.
We chose a mesh network for two fundamental reasons. First, a mesh network may be dynamically reconfigured. This enables the network to continue working even if one of the transceivers crashes, with almost no downtime. This capability is extremely important when working in challenging settings such as Mars. Second, a mesh network is scalable. It requires low setup costs and allows for easy expansion and servicing by astronauts.
The operation will be built around the habitat/base where the astronauts live (see Figure 1 below). The base is meant to have the necessary infrastructure to support the whole network and store the collected data for later scientific analysis. This includes three base stations as LoRaWAN access points, with three parabolic dishes of 150 degrees of aperture. The power of the transceivers should be around 35 dBm to ensure sufficient coverage. The three parabolic dishes will be connected to a transceiver unit that will encode the data into TCP/IP protocol. This unit will send packets to a redundant storage system which will ensure that the information is safely stored and backed up. This information may be used in research experiments, providing extremely valuable input for current and future missions.
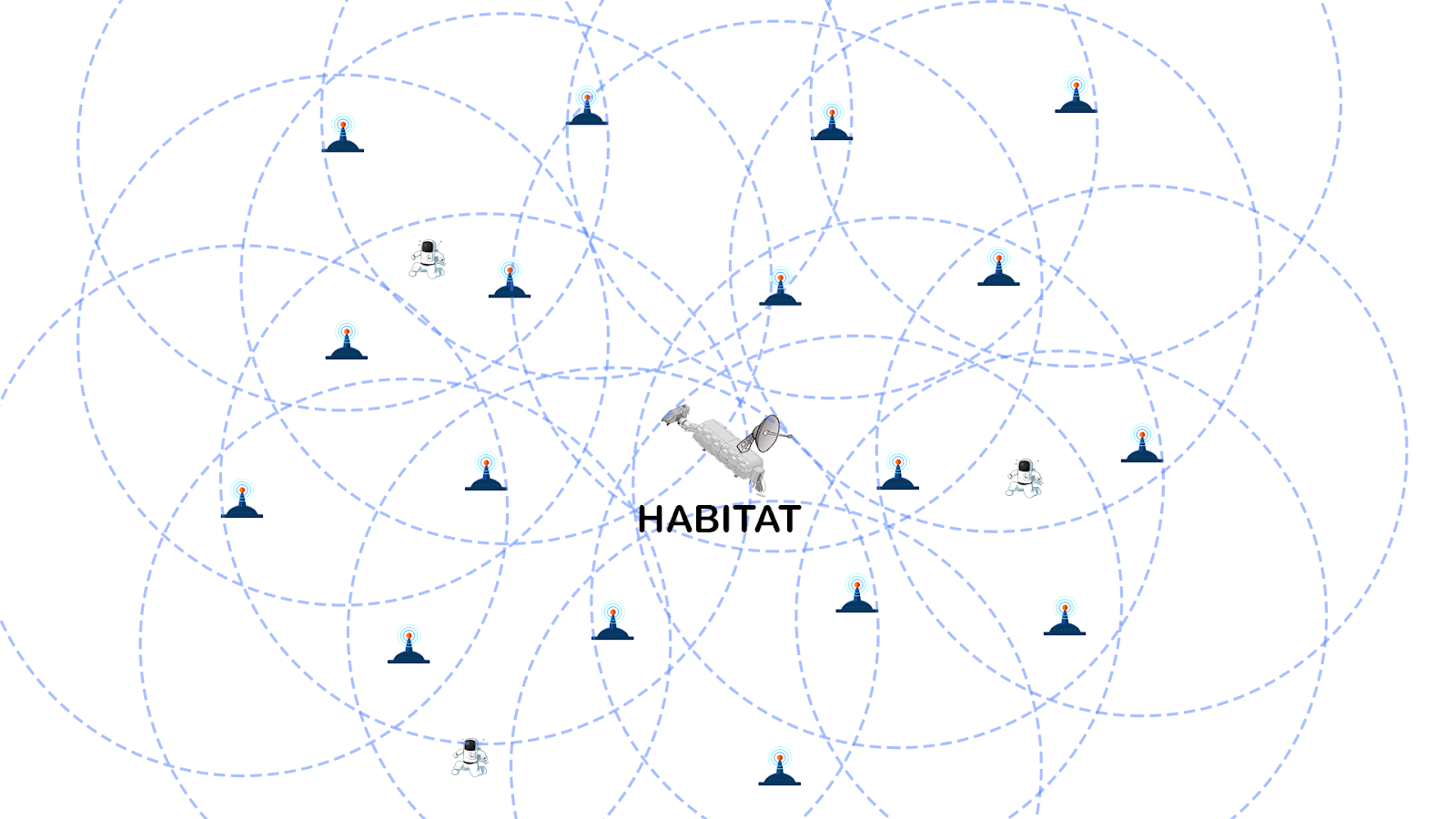
Figure 1: Mesh Network deployment example.
2.2. Remote Stations
The remote stations (also called base stations or nodes) will feature a foldable 4W Monocrystalline solar panel system with a maximum output of 16W, divided into four sections, as shown in Figure 2.
 |


Figure 2: Remote station with foldable solar panels.
These panels will be able to deliver about 1W/day on Mars’s average conditions, and are designed to remain functional under the harshest conditions. They will be outfitted with an automatic self-cleaning system as well, which is currently being developed by the US Department of Energy, to ensure that the solar panel system remains dust free (see Exhibit 1). This cleaning system is based on a changing electrostatic field, achieved with low energy consumption, with high amplitude voltage peaks. The system works by creating three 1kV phase shifted sine waves between metal strips on three different layers, as seen in Figure 3. This produces a force that pushes the dust particles away from the solar panel, thus achieving close to maximum efficiency with minimal maintenance costs.
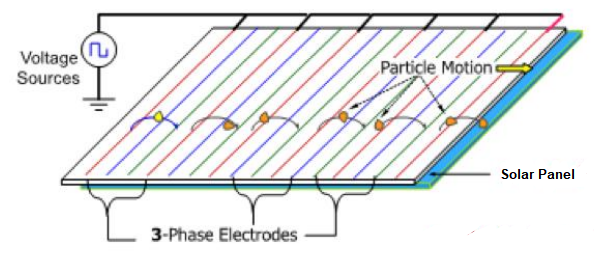
Figure 3: Solar panels’ self-cleaning system
When needed, the solar panels’ excess energy will be used to maintain the inner temperature of the station around the nominal functioning range. The panels will heat up the hermetic enclosure with the help of a temperature control system. This system will consist of a tuned PID controller which, in addition to a mineral wool insulation, will ensure the thermal stability of the remote station. Furthermore, the system will be electromagnetically isolated from the environment to prolong the lifespan of the electronic devices under the high radiation levels of Mars’ atmosphere.
The remote stations will also be supplied with a PLCB battery pack. This is suitable for temperatures of -25°C and above, without reducing the nominal capacity. According to our calculations, two 500mAh cells would be more than enough to power the nodes for several days at normal transmission rates, or even weeks in the low-energy mode.
The remote station design was devised to achieve the highest space/weight efficiency, due to the greatest part of the deployment cost being expended on the trip to Mars itself. As a case in point, consider SpaceX’s Falcon Heavy mission, which was launched in February 2018. Transporting 17 effective tons to Mars demanded about US$90 million--a cost per kg of nearly US$5300.
Each station will be equipped with a LoRa 20dBm transceptor on 915 MHz, whose purpose is to manage the communication between the remote stations and other devices in the network. This module consumes 400mW while transmitting and 5.5mW while receiving. With an every-10-seconds over a minute transmissions scheme we obtain an average power of approximately 75mW. An 6 dBi isotropic antenna will also be used. This configuration allows us to deploy the stations 5km away from each other, while having more than enough power to allow for any interference.
Additionally, the nodes will measure the following environmental parameters (see Figure 4 for a graphic representation of these capabilities):
- Outer pressure
- From 30 to 1100 pascals, using a SM5852-015W sensor, available from ServoFlo
- Gamma and Beta radiation
- Used in several other missions
- Available from numerous manufacturers
- Magnetic field
- Used to gather additional data
- Various models available, such as TLV493D, from Infineon
- Outer temperature
- Used in almost every mission, ranging from 125°K to 300°K
- Seismic movements
- Used to measure quakes and Mars’s seismic movements
- A toughed version of a Trillium Compact 20, from Nanometrics
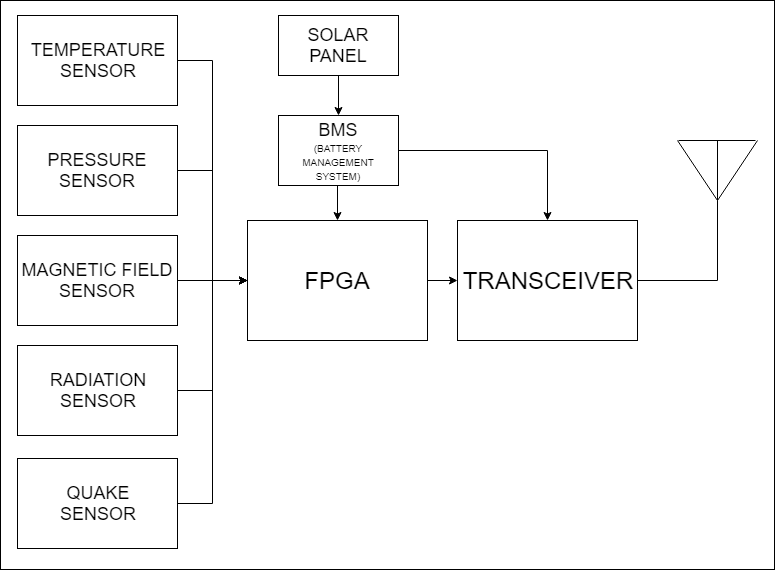
Figure 4: Block diagram of the remote stations control and communications systems
This type of network allows for the addition of any other kind of sensor that NASA or other interested parties may be interested in deploying.
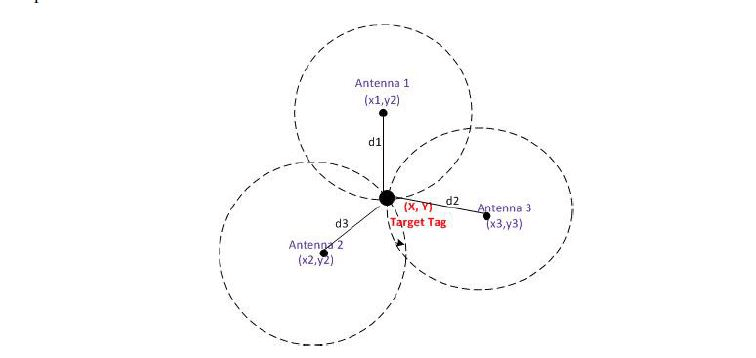
An advantage of this network is that by placing different stations in equilateral triangles dispositions we are able to trilateralize the astronaut’s position. This may be one of the key aspects of the system, providing real time positioning. Figure 5 shows a representation of this functionality.
Figure 5. Trilateralization of a position in space
Since the mobile stations are continuously being tracked, if the system detects one of them is drifting from the coverage area, warning signs will be sent both to the astronaut and to the habitat. The suit is equipped with different protocols in order to guide the astronaut back to safety. In case the connection with the mobile system is lost, the base automatically receives the astronaut’s last known position and begins a rescue protocol.
A drawback this system possesses is its reliability during high solar and cosmic radiation affected days, since these affect the communications through electromagnetic waves in free space. A viable but partial solution to this issue is to have a hard wired fiber based network between the habitats, to at least guarantee some degree of communication. If a possible solution is desired to allow the remote stations to remain operational, the whole net could also be connected through optical fiber. However, the main disadvantages are the production costs and the application viability. Kilometers of optic fiber would be required in order to cover the whole network’s extension, which limits the operation due to the transportation costs.
2.3. Mobile Stations
This part of the system is responsible for the acquisition of astronauts’ biological data through sensors placed on a harness, a bracelet, and a subcutaneous microchip, which are worn under the spacesuit, in direct contact with the astronauts’ skin. These accessories enable us to introduce the sensors in an unobtrusive way, so that they do not interfere with the crew’s activities (see Figures 6a, 6b, and 6c for graphic representations of each component).
Each accessory is programmed to collect data through different sensors initially designed for use on Earth, yet adapted to the specific needs of this mission on Mars.
All the sensors may be linked together by an FPGA based system, or similar hardware.
The harness’ function is to:
- Measure heart rate and skin hydration
- Skin Hydration is measured with a wearable sensor developed by NC State University (see Exhibit 2)
- Heart rate is measured with flexible electrodes pressed onto the skin
- Act if defibrillation is needed
- Through a battery-powered AED adapted to the harness’ design
- Measure relative position and acceleration in all three axes
- It is already available and produced by a wide range of manufacturers
Figure 6a: Harness

The bracelet will be placed on the astronaut’s upper arm, above the elbow, and will include sensors that measure blood pressure, blood oxygen levels, and heart rate (to double check the data collected by the harness). Therefore, the bracelet’s function is to measure:
- Blood pressure
- Through innovative technology currently being developed by Blumio, using two miniature radar antennas
- Blood oxygen levels
- Based on a small finger clip connected to the bracelet, available from several medical companies
- Heart rate
- Measured in conjunction with the blood´s pressure sensor
- Measured in conjunction with the blood´s pressure sensor

Figure 6b: Bracelet currently being developed
A subcutaneous microchip implant may be used to measure the astronaut’s body temperature with greater accuracy and reliability.

Figure 6c: Subcutaneous temperature sensor
These accessories may be connected to an FPGA based board placed on the back of the astronauts’ suit. All the acquired information along with some extra technical details, such as oxygen levels and flow rate, internal pressure and/or suit temperature, will be processed by the board. This board will also have a LoRaWAN based transmitter to report critical data back to the habitat via the remote stations transceivers.
2.4. Artificial Intelligence Assistant: Wilson
In order to provide astronauts with psychological support on their missions, we will develop an artificial intelligence assistant, “Wilson”.
Wilson’s purpose is to grant astronauts psychological and tactical support at all times. Depending on the situation at hand, Wilson may self-activate or be activated by the astronaut.
For example, Wilson may self-activate to alert the base that an astronaut on the move is in danger. Wilson monitors and interprets variables such as astronauts’ blood pressure, blood oxygenation, and skin hydration and, based on their values, deduces the psychological and physiological state of the astronaut. If blood pressure goes down, the heart will distribute the blood flow prioritizing the main organs, such as the brain or kidneys. In this scenario, the astronaut loses lucidity and her sense of orientation. In extreme cases, this situation could lead to serious brain damage such as an embolism. Wilson’s role is to report this situation to the habitat, so that the rest of the crew can take action.
Wilson may also self-activate if it detects that an astronaut is in psychological distress. Space missions can be challenging on a personal level: astronauts may feel isolated, homesick, anxious, or depressed. Wilson can induce these psychological states from data points such as the presence of tachycardia, high blood pressure, hyperventilation, and an increase in perspiration, among others. Based on this analysis, Wilson will reproduce a series of previously recorded messages that provide support, company, and comfort. The AI assistant will thus aim to recreate a familiar environment the astronaut can relate to so that he/she can regain emotional stability. Taking into consideration that this mission involves a one-way ticket to Mars, Wilson will analyze astronauts’ psychological reactions to the prolonged stay on the red planet and adjust its responses accordingly.
In case of emergency, Wilson can coach astronauts so they will remain calm, act safely and effectively to solve the problem, and successfully navigate the dangerous situation. This feature provides a psychological advantage by giving astronauts both guidance and support when facing the unexpected.
Lastly, Wilson may self-activate to warn astronauts on the move that they have deviated from their pre-established path. If the astronaut loses course, Wilson may intervene to provide directions so the explorer can be re-routed to meet its intended path.
Section 3: Future plans
One of the great advantages of the DeltaMesh lies in its scalability: it would be possible to expand the covered zone by adding remote stations and, eventually, more habitats. Linking habitats through an optic fiber system will generate more bases with their own interconnected sensor net. If variables other than those considered in our design were required to be measured, the corresponding sensors may be added to the remote stations, incorporating them to the net.
What is more, Wilson’s functionalities may be expanded as technology improves and/or the availability of data becomes sufficient to model human behavior more accurately and comprehensively. For example, once enough data from different individuals has been collected over a considerable period of time, more personalized Wilson reactions may be created to fit different personality types, thereby improving the assistant’s performance as a companion and guide. This would require collaboration and knowledge sharing by psychologists, sociologists, physicians, and computer programmers working together in interdisciplinary teams.
To conclude, an app that allows communication between Wilson and the Earth could be developed so that astronauts can get in touch with their family and friends. Interaction with loved ones on Earth may enhance the experience of living on Mars. In turn, Wilson’s functionalities may also prove useful on Earth to treat a variety of physiological and psychological conditions. The assistant may be adapted to serve a variety of everyday needs on our planet.
More info!
More information and project documentation can be found at https://github.com/juantinazzo/SpaceApps2018
Sources
- [online]https://en.wikipedia.org/wiki/Sample_Analysis_at_Mars [visited on 10/20/2018]
- [online]https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19890018252.pdf [visited on 10/20/2018]
- [online]https://ssed.gsfc.nasa.gov/sam/sam.html [visited on 10/20/2018]
- [online]https://ssed.gsfc.nasa.gov/sam/2d/ [visited on 10/20/2018]
- [online]https://www.space.com/23875-mars-radiation-life-manned-mission.html [visited on 10/20/2018]
- [online]http://materias.fi.uba.ar/6731/Tablas/Tabla10.pdf [visited on 10/20/2018]
- [online]https://www.colibrys.com/wp-content/uploads/2018/03/30s-vs1000-e-02-18.pdf [visited on 10/20/2018]
- [online]https://www.colibrys.com/product/vs1000-vibration-sensor/ [visited on 10/20/2018]
- [online]https://universitam.com/academicos/noticias/desarrollan-un-sensor-portatil-de -bajo-costo-para-medir-la-hidratacion-de-la-piel-en-tiempo-real/ [visited on 10/20/2018]
- [online]https://www.energy.gov/sites/prod/files/2016/04/f30/Prototype%20Development%20and%20Evaluation%20of%20Self-Cleaning%20Concentrated%20Solar%20Power%20Collectors%20Boston%20University%205794.pdf [visited on 10/20/2018]
- [online]https://www.adinstruments.com/products/equivital-sensor-belt [visited on 10/20/2018]
- [online]https://news.ncsu.edu/2017/01/hydration-sensor-2017/ [visited on 10/20/2018]
- [online]https://www.servoflo.com/pressure-sensors/suppliers/silicon-microstructures/398-sm5852 [visited on 10/20/2018]

SpaceApps is a NASA incubator innovation program.