


Space Spiders | Design by Nature
Awards & Nominations
Space Spiders has received the following awards and nominations. Way to go!
The Challenge | Design by Nature
Space Spiders
Designing an free flyer autonomous object, that can inspect, repair and a lot of other things the outer parts of space crafts.
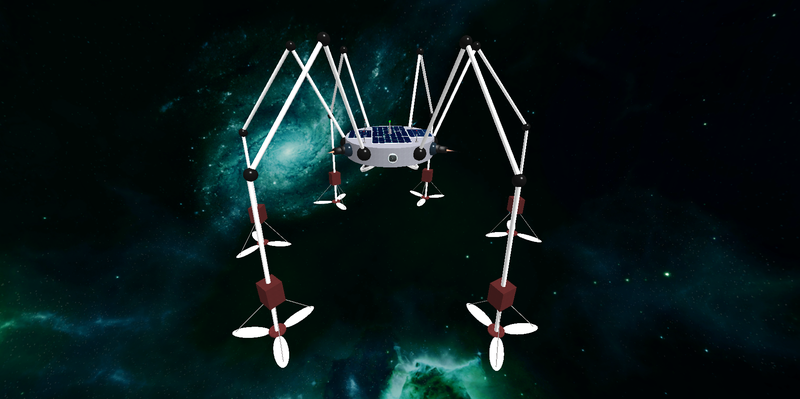
We have designed a free-flyer (Space Spider) inspired in many ways by elegant solutions made by nature.We have implemented the legs which are similar in functions to gecko legs and their adhesive nature with microfibers.The microfiber attach by Van der Waals forces being pressed into the surface.
The structure of the autonomous robot is similar with an spider and we believe this is one of the most suitable forms for walking, climbing, flying, inspecting, repairing and many other things. Its obvious that this form give a lot of flexibility for walking in different terrains or structures and complicated spaces.
The autonomous robot is full packet with features and abilities that we believe are possible to realize with actual technology. In the legs apart from gecko structure we have design vibrations sensors that can detect in real time crashes and damages from outside objects. All the legs detect simultaneously and create an map, and give a rouged idea where the exact point of damage is. In this way it can go faster to the damage area to inspect and even repair if possible.
The classic propulsive system is also present to help accomplish jumps making possible to move further and faster, Together with walking method make this a full solution for going anywhere robot need to go.
Its equipped with the portable Shuttle scan 3D making possible to do real time scanning for structural damages.
An full 3D view of the object that is memorized in the robot is automatically compared with live 3D scanning and when a difference is found an alarm is given to the crew of the ship or in the earth. Full 360 view is possible by its cameras that can also serve as live view when remote controlled.
Also when judged possible an repair action can be taken. Equipped with an strong spray material it can make a temporary fix in critical situations.
Dimensions of the robot are kept minimal as much as today technology can offer. This way the costs are keeping low making it an more feasible project as it can.
It equipped with solar panels to maximize its service time and low maintenance.
its modular approach make it flexible for many time of missions . One or more legs can be replaced with hands tools or other object.
And in the end as much as we love our creation the drone is equipped with an self destructive procedure in rare cases when the robot is lost from the ship and is impossible to return. In such cases the robot calculate the final route and enter in the atmosphere to accomplish self destruction. In this way it make its last contribute keeping space debris as low as possible.
Reference:
https://en.wikipedia.org/wiki/Space_Shuttle_Columb...
https://en.wikipedia.org/wiki/Apollo_13
http://web.stanford.edu/group/mota/education/Physi...
https://technology.nasa.gov/patent/TOP2-128

SpaceApps is a NASA incubator innovation program.