


DPK-Moongroupé | Mission to the Moon!
Awards & Nominations
DPK-Moongroupé has received the following awards and nominations. Way to go!
The Challenge | Mission to the Moon!
Far Side Project
Far Side Project is an ambitious endeavor to gather greater amounts of data from the far side of the Moon and more specifically - Mare Moscoviense.
The Far Side Project
By DPK- Moongroupé
Throughout the centuries, mankind has been fascinated by the Moon. From poetry to religion, for as long as we have existed as a human race, our only natural satellite has helped us shape our vision of the world we live in.(For example, inspiring Newton himself to describe the gravitational forces)
But there is still a lot more to be learned and many mysteries to be solved. The objective of our team is to plan a challenging mission to the Moon that will broaden our horizons and our current understanding of the world as we know it.
The Mission
Our mission objective is to land a rover using a lander on the far side of the Moon. For clarity we will divide our plan into several parts:
1. The satellite (with which to communicate with the rover and the lander)
2. Landing site and landing of the lander and the rover
3. Construction of the lander
4. Construction of the rover
5. Executing our mission
6. Potential results
1. The satellite
Our goal is to land our rover and lander couple on the far side of the Moon. Why there exactly will be further discussed later on in the plan. The problem with this idea, however, is that in order to control our lander and rover, as well as receive information from them, we would need additional satellites that would transfer the data between the rover and Earth. One way to achieve this would be to have up to three or four satellites orbiting the Moon, but this is not very cost effective. Our take on this is very simple, yet elegant. Our plan is to have a satellite in the second Lagrangian point of the Earth-Moon system. By calculating the visible angular diameter of the Moon and Earth from that point we can see, that the Earth will be fully covered by the Moon. But what we are after is not the visible angular diameter of the Earth, but that of the satellites orbiting it. By making some calculations we can see that the satellites orbiting the Earth will be visible from the second Lagrangian point, thus enabling the communication between the Earth and the lunar couple through two satellites, one orbiting the Earth and the other in the second Lagrangian point.
2. Landing site and landing of the lunar couple
After our satellite is in place, the rover and the lander will also be launched. The real questions are where and how will they land. Let’s begin with the first one - the location of the landing site.
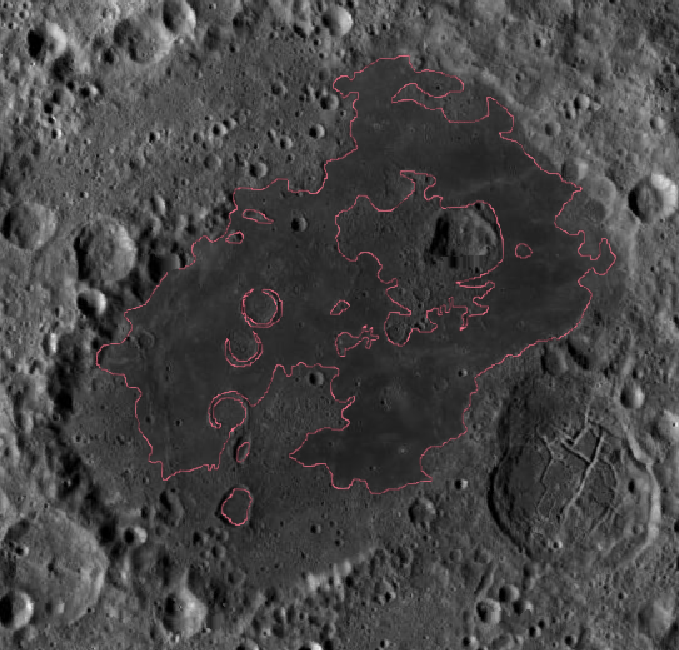
After extensive research for potential landing spots, we now have our sights on Mare Moscoviense - a great lunar mare located on the far side of the Moon. There have been numerous missions that have studied the near side of the moon, but there have been none that have dared to venture into the far side. No spacecraft has landed there before. This is why we believe that there are a lot of questions that can be answered by exploring it. Questions that deal with the origins of the Moon, as well as seismic activity, among many other things. This all, of course, poses great challenges. Not only because this side of the Moon faces ever away from the Earth, but also because the terrain there is far from rover- and lander-friendly. Here Mare Moscoviense comes to the rescue, being one of the only places on the far side free of rough geological features like steep crater walls and sharp peaks. This mare is like an oasis of flat basaltic plains. This is because of its volcanic origins. Not only that, but there is an abundance of iron, titan, olivine, thorium and helium-3, as well as the possible presence of water ice. It is of incredible importance to study these deposits, for they may hold the key to the future colonization of the Moon. Thorium and helium-3 could be used as power sources for future lunar bases. Exploring the water deposits can also lay the basis for the future exploitation of the Moon’s resources. Landing on a place like Mare Moscoviense can potentially give us the opportunity to examine up close the harvesting potential of these materials. And maybe by exploring the Moon we can learn things that could be put to great use here on Earth.
3. Construction of the lander - estimated mass 8 metric tons
The first component will be the lander. It has more than one purpose. The first one is pretty straightforward - to safely land itself on and deliver the rover to the lunar surface. It will be equipped with four liquid-propellant rocket engines, powered by Aerozine 50 as fuel and dinitrogen tetroxide as oxidizer. After landing (hopefully safely) it will be able to explore and study the lunar surface by using a wide variety of instruments:
- Two plutonium-238 powered radioisotope thermoelectric generators will be placed on the lander to provide heat and electricity during the long (~17 days) and cold (-175°C) lunar nights. As well as warming the lander, the two generators will also be used to keep the instruments on board of the rover in working condition during the freezing nights.
- Electricity and heat transitioning socket - will be placed on the bottom part of the lander. This will be used for transitioning heat and electricity from the lander to the rover. The connection will be established with the help of a pin located on the rover’s robotic hand.
- A true-color wide angle camera positioned on the bottom of the lander next to the rover’s compartment. It will record videos during the lander's descent toward the lunar surface, thus providing us with a good view of the landing area. It will also be used during the jumps of the lander.
- Six black and white wide-angle camerasthat will provide information for near surroundings of the lander. They will help us determine the safest way of maneuvering the lander, by alerting us for unsuitable landing terrain or dangerous geological formations.
- Four liquid-propellant rocket engines will be used to move the lander to different locations across the lunar mare. The Moon, being smaller than Earth, has a gravitational pull smaller roughly by a factor of six. Thus, the movement of the lander across the surface will be enabled by using reserves of fuel and oxidizer to make parabular jumps.
- Thermal Emission Spectrometer - enables us to investigate the mineralogy of iron-bearing volcanic rocks and minerals like olivine. Iron being one of the elements in great abundance in the Mare Moscoviense.
- X-ray diffraction and fluorescence will measure the abundances of various heavy metals and other materials.
- Ground penetrating radar - will allow the observation of geologic features up to 10 meters beneath the lunar surface, depending on the composition of the ground.
- Sensors for radiation and temperature - pretty straight forward.
- Seismometer - this will help us study seismologic activity on the far side of the Moon. It will also give us information about the frequency of meteoroid impacts and the inner composition of the inner lunar layers.
4. Construction of the rover - estimated mass 250 kg
Our rover is designed to be light and very maneuverable. That is why most of the instruments are located on the lander. But nonetheless, the rover will also have a crucial role in the exploration of Mare Moscoviense.
- Solar panels will be used to power the rover during the lunar day. They will be positioned on the back of the rover and will be able to adjust their angle in order to receive optimal amounts of energy from the Sun.
- Batteries will also be positioned on board in order to store energy generated by the lander for later usage.
- Eight black and white wide-angle cameras will be positioned in four pairs on all sides of the rover. They will be used to navigate the rover through the lunar terrain and help it avoid dangerous geological features.
Our rover will be able to operate a highly maneuverable robotic arm that is equipped with:
- Self-focusing camera with micro lens positioned on the robotic hand will be able to make colored close-up shots of lunar rocks (12.5 micrometers). This will help us explore with great accuracy wide variety of geological features, that are present on the lunar surface.
- Alpha and X-ray spectrometers will be used to give us detailed information about the composition of lunar rocks, which will help us determine how they were formed.
- Hollow drill/penetrator - will be used to collect samples of rocks for further analyzing within the lander.
- Abrasion instrument that will be able to clear the top layer of lunar dust in order for more precise measurements of the composition of the rock underneath it to be made.
- Catching instrument that will enable the rover to collect samples of lunar rocks.
Now let’s have a look at some of the other instruments and gadgets that are not located in the robotic arm:
- The bigger samples collected by the hand’s catching instrument will be safely stored in five compartments on the top of the rover, where they will be later examined by the lander’s instruments.
- Camera, laser and spectrometers resembling the chemical camera on Curiosity will be placed on our rover. It will be able to identify the chemical composition of rocks and soils, including their atomic and molecular makeup from a distance of more than 7 meters.
- Two color image and color video footage cameras that will be used for studying the landscape far from the rover. These cameras will be the eyes of our rover as they will be one of the main instruments that will be used for orientation and landscape analysis.
- A 360° camera will be placed on top of the rover. These camera will be able to make 360° photos and videos that can be later viewed using a VR headset. By enabling a normal person to view the previously unknown lunar landscape, this feature will likely spark the public interest in the far side of the Moon.
- Calibration targets will be needed in order to calibrate some of the instruments on the rover and the lander. These will be placed on the top side of the rover, thus staying in reach of the instruments on the robotic arm as well as the instruments on the bottom of the lander.
- A neutron spectroscope will also be placed in the rover. It will be used for the search of helium and water ice on the lunar surface.
5. Executing our plan
By working together, the lander and rover couple will have the ability to explore Mare Moscoviense. After landing, the rover will be released from the lander. He will have time during the lunar day to explore the landscape with its instruments, but it must come back to the lander when the sun comes down. Because the rover is designed to be light, we have all of the radioisotope thermoelectric generators on the lander, leaving the rover with only electric heaters, placed in order to heat the rover’s instruments. The problem is that the rovers only power source are the solar panels on his back. That is why it won’t be able to operate during the lunar nights. The lander will provide the heat needed to keep the instruments on board the rover in working condition.
During its 17 days of exploring the surface of the mare during the lunar day, the rover will be able to collect samples, which will be later examined by the instruments on board the lander, for example the Thermal Emission Spectrometer and the X-ray diffraction and fluorescence instrument. The samples will be carried in the special compartments on the rovers back and then they will be inserted in the lander’s instrument by the rover’s robotic hand.
After exploring the area around the lander, the rover will continue to venture into the unknown. But of course, it needs the lander to survive during the lunar nights, so instead of it going back to the it, the lander itself will make a jump using its thrusters and will arrive within reachable distance for the rover. As a result of this, the rover will have a new area to explore. By repeating this process, the two modules, together, will be able to collect a lot of new information about our Moon.
The path of the rover is also chosen. It is what we think to be the ultimate path, that will allow us to explore the most interesting places in the sea – places with abundances of iron, thorium, titan, helium-3 and water ice. We also plan to pass through and explore some of the so-called wrinkle ridges and swirls. An optimistic assumption for length of the route is 176 km.
6. Potential results
We expect this mission to achieve a number of very important goals. One of them is to have a deeper understanding of the Moon’s formation. We will be able to explore the inner layers on the far side of the Moon by using the ground penetrating radar and the seismometer. Not only that, but by using the seismometer on board of the lander, we will gather information about the lunar seismic activity as well as the frequency of meteor impacts on the far side. This can give us useful data about the conditions on the far side of the Moon. By also examining the chemical structure of the lunar rocks there, and the abundance of water ice, helium-3, and some of the heavy metals, we will have more data that can be used not only for the planning of future missions, but also for establishing a colony on our nearest celestial neighbor. And last but not least, hopefully this mission will rekindle public interest in the Moon.
Resources:
https://moontrek.jpl.nasa.gov/
https://en.wikipedia.org/wiki/Curiosity_(rover)#In...
https://en.wikipedia.org/wiki/Thermal_Emission_Spe...
https://en.wikipedia.org/wiki/Alpha-particle_spect...
https://mars.nasa.gov/msl/mission/instruments/spec...
https://mars.nasa.gov/odyssey/mission/index.cfm
https://mars.nasa.gov/mars-exploration/missions/?p...
https://moon.nasa.gov/about/who-has-been-to-the-mo...
https://solarsystem.nasa.gov/missions/apollo-14/in...
http://phoenix.lpl.arizona.edu/science_meca.php
https://agupubs.onlinelibrary.wiley.com/doi/pdf/10...
https://pds-imaging.jpl.nasa.gov/documentation/MEC...
https://mars.nasa.gov/mer/science/
https://mars.nasa.gov/msl/mission/instruments/spec...
http://www.asc-csa.gc.ca/eng/astronomy/mars/apxs.a...
http://spaceflight101.com/msl/apxs-instrument-info...
http://www.clker.com/clipart-radio-waves-4.html?fb...

SpaceApps is a NASA incubator innovation program.