


Team Atlas | Make Sense Out of Mars
The Challenge | Make Sense Out of Mars
Infomars
The name of our project is infomars which can be used to gather information about mars rapidly and precisely.It uses various sensors to gain information like pH level,water level,radiation level etc and sends 12 info with one still picture.
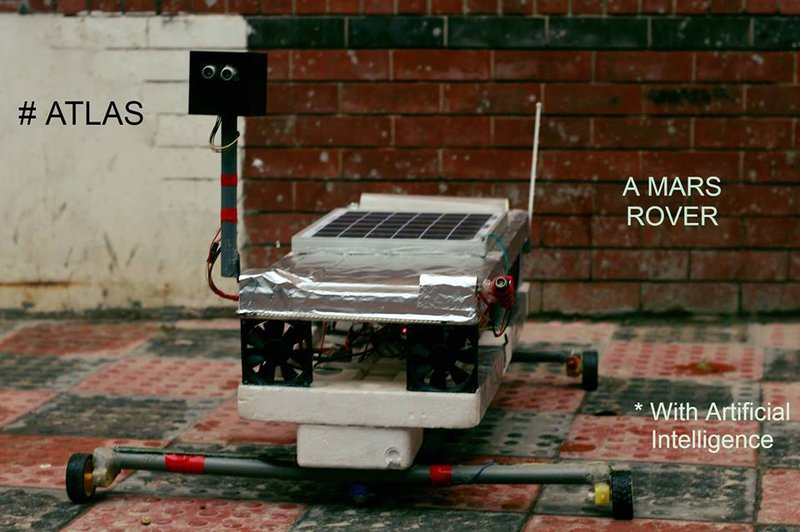
ATLAS MARS ROVER
We are Team Atlas . Name of our rover is Atlas Mars Rover (Infomars) . We are working for making our rover . We are giving summery in our proposal about our rover . today we will discuss about our new parts and some changes . Firstly we make a change in rover’s wheel . Before we use normal elastic tire . but now weset some peazo ceramic inside the wheel body . when the wheel will move then a force fall on the peazo . as a result the peazo will convert the force as a number electricity. There are six wheel in our rover and we use this system each wheel .when the rover will move from here to there then this system make a number of electricity . it is an another source of electricity . the sketch is here –
We also use solar but in a different shape . we make our solar like a cube .As a result it can collect light from each side . it can store more electricity in it’s battery . the shape of solar is bellow –
We made a normal sketch for give a knowledge about our idea.we are trying to make a good source of electricity . but these are the basic way . rover alwaysget the electricity from this two systems .
#Secondly we make a big change in our rover in controller part ... Before we use only RC transmitter for control the rover .. But now we make a special balloon{ Hydrogen gas Balloon } for control the rover .. As a result now I can move the rover very fast than before . and also we can get all kinds of data clearly .we can navigate the rover easily.. our radar can working properly … so we make this change . when we control the rover thenI will launch the balloon. Height of the balloon is equal the distance of rover ..the law is =Distance of rover ~ Height of Balloon.The diagram is here-
this is the communication system . we use here eight channel reicever to controlthe rover .the balloon is here-
here is the process –
#we attach a virtual communication system . this system will attached with the rover’s transformation and communication system . we can speak with that system .. an example is here – ‘ hay Atlas , could you please tell me the battery charge ’
it will replied – ‘ battery charge is 50 percent and system can run for 22 hours ’
‘Is there any kind of ray or radiation?’
‘yes , I get some ray . this is an Alpha ray’.
this is a demo of our rover communication.
we are using java to write the code.
#we use a dust removing system with the cpu of rover . we use this system in microscope machine, radiation detecting system and the data processing system . there is a IR sensor which detect the layer of dust . after detecting it will open the cleaner system .then it will clean the dust.
we use this cooler fan . we also use nano cooler fan in raspberry pi ..
The Robotic Arm holds and maneuvers the instruments that help scientists get up-close and personal with Martian rocks and soil.
Much like a human arm, the robotic arm has flexibility through three joints: the rover's shoulder, elbow, and wrist. The arm enables a tool belt of scientists' instruments to extend, bend, and angle precisely against a rock to work as a human geologist would: grinding away layers, taking microscopic images, and analyzing the elemental composition of the rocks and soil.
At the end of the arm is a turret, shaped like a cross. This turret, a hand-like structure, holds various tools that can spin through a 350-degree turning range. Design of our arm is here -
We attacha emergency stop system with our rover . when our server or controller will be disconnect then the power switch will automatically stop and rover will stop on that place . there will beanother switch for the judge .when they want to stop the rover they can do it .
Visit our work –
this is our experimental robot .. we firstly check our system in this rover . after get approval we use that system in our main rover ATLAS .
Our project is mainly built focusing on the process of sending information continuously from mars to earth.The sensors used to make it are :
humidity sensor
water level sensor
IR radiation sensor
temperature sensor
motion sensor
moisture sensor
and also we use lot kinds of materials in our rover
It uses solar power to charge itself.A camera is used to take pictures of its display and send it to earth.

SpaceApps is a NASA incubator innovation program.