


RoboMars | Make Sense Out of Mars
The Challenge | Make Sense Out of Mars
Space planting-mars
A robot detects temperature,pressure,pH and other minerals of soil of mars to find the best sustainable places for agriculture, the robot will be provided by suitable metals to be adaptable to circumstances of mars like temperature, wind speed and pressure
love exploring the space,the desire to discover another life in other planets,and face challenges in earth like population growth,pollution and decreasing of sources . All of these are reasons that made discovering space is required thing , and that is what happened now that NASA is sending missions to other planets and try to find life in these plants by putting some plans, one of these plans is the mission to mars that NASA want people to live on mars , and we found that agriculture is a base thing to begin new life so we searched for many solutions and finally we selected spider robot with sensors to detect minerals,pH,Humidity, organic matters and other minerals in soil of mars ,and to try to match between the minerals of earth`s soil and minerals of mars`s soil we will provide the robot by micro-controller to compare between them and then it will send the results to us by the following mechanism :
The sensors will examine the soil to detect the minerals and other characteristics then it will send values to Micro Controller then it will compare these values with values that we put it in the code before (values of minerals in earth`s soil).
If the value matched, it will give a message “valid” But if not “invalid” message with unmatched values.
- What are the sensors we using?
1) Electromagnetic sensors: that measure the various properties of soil components that may affect crop productivity, such as soil texture, cation exchange capacity (CEC), drainage conditions, organic matter level, salinity, and subsoil characteristics. The sensors use electric circuits to measure the capability of soil particles to conduct or accumulate electrical charge.
2) Electrochemical Sensors: that measure the pH and the soil nutrient levels. It’s a great replacement for standard chemical soil analysis.
3) Mechanical Sensor: which is used to estimate soil mechanical resistance (compaction) as related to the variable level of compaction. They use a mechanism that penetrates or cuts through the soil and records the force measured by strain gauges or load cells.
4) Airflow sensor: which measures soil’s air permeability.
we know that climate of mars unlike earth in many characteristics like :-
1-temperature :in mars the temperature near the poles in winter is -125 Celsius , temperature near equator in summer is 20 Celsius and the average temperature is equal -60 Celsius.
2- pH : the soil of mars has value of pH from 8 to 9
3- pressure: surface pressure in mars is very low ( 7.5 millibars or 0.224 inches of mercury )
4- gravity of mars equals 3.711 m/s
5- wind speed : average speed of wind during summer registered 2 to 7 meters per second ( 5 to 16 meter per hour ) , across the year the wind speed on mars averaged 10 meters per second or ( 22 meter per hour ) , and it can reach up to 17 to 30 meters per second .the maximum speed of wind in mars is 30 meters per second (60 meters per hour ) .
for all these circumstances our real robot must have design requirements to provide the robot by the ability to resist these circumstances and to be most efficient .
-Design requirements:
1- suitable metal :
the structure of our real robot will contain some metals that can resist the circumstances of the mars like titanium,aluminum,bronze,copper,lead,germanium,tellurium,silver,stainless steel,silicon and tungsten .
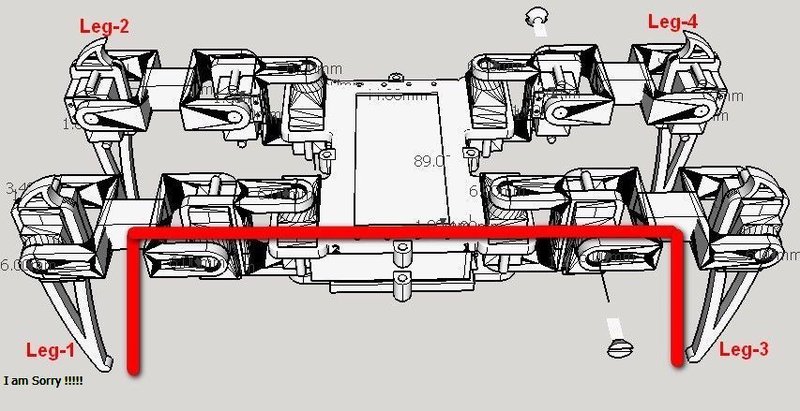
2-mobility :
the robot will be spider shape to give it more stability and less space occupation. and the sensors will be light to move easily .
3- cost :
the robot will use sensors to detect minerals in the soil instead of using chemicals which considered very expensive .
after applying these requirements our robot will be adaptable to work efficiently in mars .
sources :
https://www.space.com/16907-what-is-the-temperature-of-mars.html
https://www.cropnutrition.com/efu-soil-ph
https://sciencing.com/average-daily-wind-speed-24011.html
https://mars.nasa.gov/resources/7301/gale-craters-surface-materials/
https://mars.nasa.gov/weather/storm-watch-2018/
https://mars.nasa.gov/msl/mission/instruments/environsensors/rems/
https://mars.nasa.gov/programmissions/science/goal2/
https://www.nasa.gov/mission_pages/mars/missions/index-past.html
https://www.nytimes.com/2008/06/27/science/space/2...
https://pubs.acs.org/cen/news/86/i26/8626news4.html

SpaceApps is a NASA incubator innovation program.