


PlaNS - Planetary Navigation and Sensors | Make Sense Out of Mars
Awards & Nominations
PlaNS - Planetary Navigation and Sensors has received the following awards and nominations. Way to go!
The Challenge | Make Sense Out of Mars
PlaNS - Planetary Navigation and Sensors System
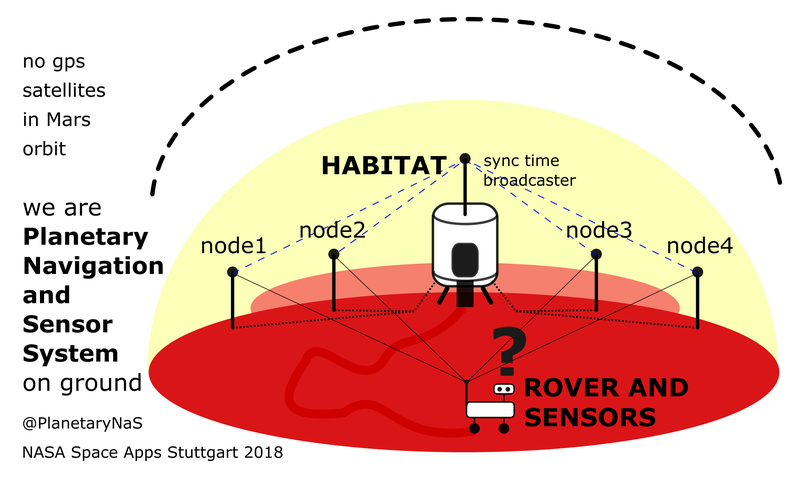
There is no GPS around Mars, so rovers, sensors and even astronauts need to be located differently. Our PlaNS will solve this problem with a ground based positioning system. Nothing and no one will be left behind on any planet with our PlaNS, even today
Hi, we are team PlaNS.
We worked on the Planetary Navigation and Sensor System.
There is no GPS around Mars, so rovers, sensors and even astronauts need to be located differently.
Our PlaNS will solve this problem with a ground based positioning system. During normal data transmission from the sensor on the rover, or inside the Astronauts space suits, the PlaNS connects to it and constantly tracks the rover and determines its position inside the habitat.
So the rover can get lost in a crater and losing connection to the habitat, but the last location is known, so the rover can be recovered and also no Astronaut like Mark Watney will be left on Mars again.
Nothing and no one will be left behind on any planet with our PlaNS, even today
Find us on https://twitter.com/PlanetaryNaS
Work with us on https://github.com/aerospaceresearch/Planetary-Nav...
We support the MIT open-source license!
Mission Statement
Localizing and never loosing any sensor, rover and Astronaut on Mars without a GPS! PlaNS shall create a hybrid data and localizing sensor network, and also serve as a personal tracking aid for astronauts during extra base activities.
The Problem
During the current phase of Mars exploration it is difficult to position rovers and other assets on Mars because there are no Global Navigational Satellite Systems (GNSS) like GPS, Galileo, Glonass or Beidou in Martian Orbits and thus all rovers must rely on inertial measurement units (IMUs) for their relative position. Over time, the measured position can deviate from the real position and summing up over a long time. This poses a possible danger when the rover can drive into a creater because it calculated its position still outside the crater.
Now imagine Astronauts on Mars losing a team mate because they don't know his/her last position! There is currently no other GNSS like system on Mars and the installation of a 12+ satellite system offering a global positioning system for Mars won't take place during the first exploration phases due to budgiting and infrastructure reasons.
The Solution
Our solution includes a scalable approach based on a mobile antenna array system that is synchronized via a central time source from the base habitat (via wires or wireless) and localizing the position of any signal by its nominal and permanent transmission to the antennas.
The antenna system will grow with its tasks. It will start with 5-6 antennas near the first landing site's habitat and can be place within walking distance and then to nearby elevated landmarks like mountains or crater rims. With each new habitat module, the antenna grid is expanded and the coverage zone of sensor data transmission and positioning will be expanded.
Even with a Martian GPS at one point, the PlaNS system can serve as an additional or redundant terrestrial communication and localisation system.
The Technical Approach
Our system can be realized by current, state of the art technologies. We decided for a rapid prototype appraoch by using Software Defined Radio receiver sticks serving as receivers at each antenna array's groundstation and using two transmitters on ISM and PWM bands simulating the sensors and Astronauts transceivers.

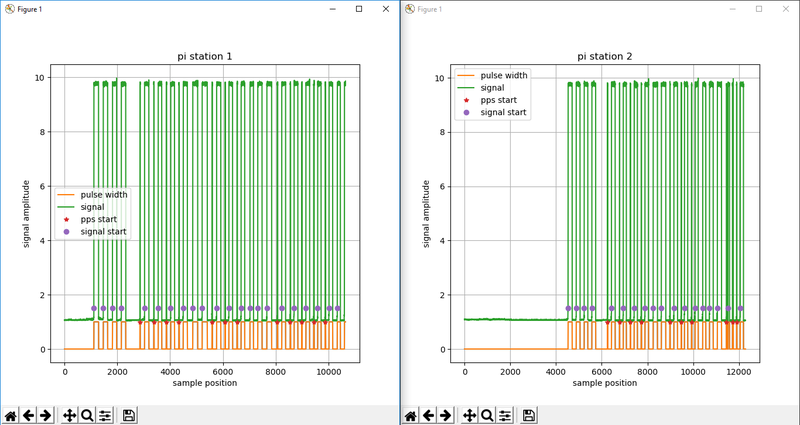
Our appraoch also includes timesynching on the same transmitting channel as the sensors and Astronauts. Due to the fact that the relative positions of the antenna array ground stations and also the position of the central time synching transmitter are known, one time synching pulse can be used at all stations for synching their local system times. With this, a Time Difference of Arrival (TDOA) can be achieved with each incoming signal from sensors and Astronauts.
Future
Only the sampling rate of the receivers will limit the accuracy of the system. With our "cheap" demonstrators, samplingrate is 2MHz and thus the distance the electro-magnetic wave is travelling will be about 150 meters. Our system will give rough directions but for less than 50€ per ground station. More suffisticated SDR receivers like HackRF or LimeSDR will improve the accuracy.
The team decided to keep on working on PlaNS because it is also relevant for further Planets and Moons, but mainly on Earth. A mobile search and rescue system for hikers in areas with deep valleys blocking the GNSS reception will speed up the localization, bringing the rescue team earlier to the accident area and thus saving lifes!

Status
We are currently working on the analysis of our measuring test during the Space Apps 2018 Hackathon.
The PlaNS system is part of the Distributed Ground Station Network (DGSN) where a similar approach is used to track cubesats and other satellites in orbit. So PlaNS is a natural extension of DGSN and will be worked on with the community and also during future Google Summer of Code campaigns.

SpaceApps is a NASA incubator innovation program.