


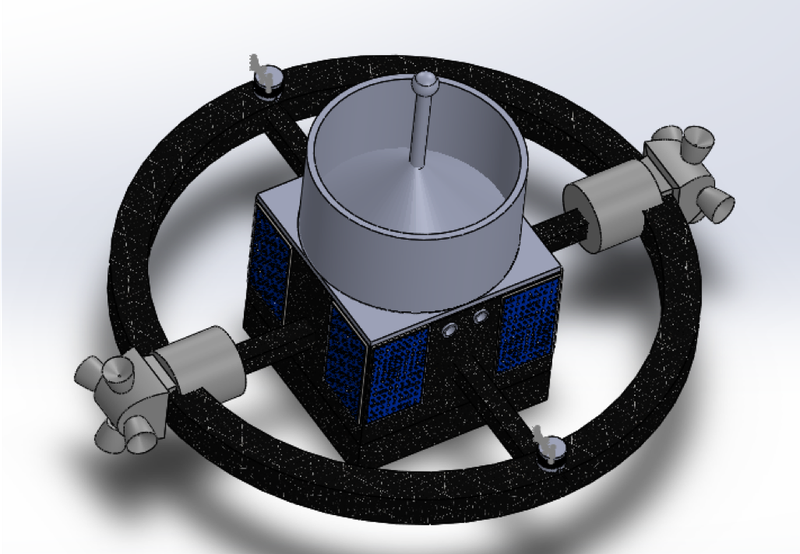
The Platform
The Space Quad platform has been designed with reusability and safety as top priorities. It has also been designed to make the most of the current technologies and tools used on the ISS. This Unmanned Space Vehicle (USV) can dock with the Canadarm using its conventional docking port and then uses its RCS system to navigate to otherwise unreachable areas, leveraging its power reserves and generation based on solar cells and lithium-ion batteries to extend the station self-diagnostic tools. The platform has been designed to reach similar speeds as the Canadarm (0,6m/s) and has an array of lidar systems to detect and avoid collisions. The on-board control system also makes use of its optically calibrated inertial complex, comparing its dynamic features to known position of the ISS to generate a safe trajectory. Finally, the USV can be docked with the station using the Canadarm, allowing it to replenish its fuel cells and power.
Main technical features
- Canadarm docking capabilities
- Main structure made of Carbon Fiber that could be coated to protect from radiation
- 2 modules of 4 RCS Thrusters for complete range of motion
- 2 360 degrees lidar sensor to detect and avoid collisions
- 8 solar panels
- RCS gas storage with refueling capability


Design by Nature
Indicatoridae are indicator birds used by humans to guide them to bee hives . The birds search for the emplacements of the hives and later transmit the information to man through a special singing tone . Inspired by them , the unmanned space vehicle searches for the emplacements of the space debris and damages on the International Space Station and transmits the information to the ISS’s astronauts . The astronauts will then share the data with Mission Control on Earth .

Control System
The Space Quad platform is controlled autonomously using a combination of proximity sensors and modelized trajectory planning. There are two proximity lidar systems installed on the USV, allowing it to have a complete view over its surroundings. The platform has internal linear and angular acceleration sensors, allowing it to position itself relative to the space station’s referential system. To account for the drift that may be created in the positioning system, a laser calibration module using retroreflector positioned on the space station has been designed. The trajectory of the Space Quad platform is generated using all the positioning data to ensure a complete coverage of the station’s surface with our analysis tools.

Propellants
A liquid form of hydrozine ( N2H4 ) and dinitrogen tetroxide are used as propellants for the unmanned space vehicle . The fuel ( hydrozine ) and the oxidant ( dinitrogen tetroxide ) are stored in fuel tanks inside the USV . Two fuel lines are connected to the combustion chamber through the injectors . Since the dinitrogen tetroxide is used as a catalyst , the atomization and the mixing of the products will trigger the decomposition of the hydrozine . This highly energetic reaction is then directed to one or many nosels of the RCS .

Blind spot accessibility
Able to identify damage currently not visible from windows or Canadarm. With sensor able to capture images in different directions, it is possible to capture damages that are not currently visible from the windows of the ISS or from cameras already installed on the ISS.
Compatible with Canadarm
The platform can navigate while being docked with Canadarm. A docking station on the drone was added so that some local analysis may be performed without using propellant and to allow the Canadarm to oversee the docking procedure.

Lithium Ion Batteries
- Performance Advantages
- Lightweight
- Low self discharge rates
- Reduced System Complexity
- High cell operating voltage (3.5 volts)
- Conformable geometry - cells are flexible
- Solid State Construction
- No free electrolyte
- Reduced cost
- Smart batteries
- Independent cell charge/discharge controllers
- Keeps cells in balance
- Extends cycle life
- Reduced heat generation rates

Solar panels
Allows for independent energy regeneration. When in low power consumption mode, it is possible to recharge the batteries in preparation for high power requirements maneuvers and data acquisition.

3D Camera Sensor
Stereoscopic camera for 3D imagery makes it possible to get crystal clear images and analyze more efficiently data received. It can also analyze more precisely the location of anomalies with overlap between multiple pictures. Easy analysis with imagery software. UV filters for better clarity images and shadow filtering. Image comparison analysis based on location for better data processing results.
- First line sensor for the inspection
- Stereoscopic camera for 3D imagery
- High precision location of anomalies
- Easy analysis with imagery software
- UV filter for better clarity images and shadow filtering
- Image comparison analysis based on location for better data processing results


LiDAR sensor
- Holes detection
- Multiple view angles for maximum precision
- Damage depth analysis
- Region of interest classification of based on damage gravity

Automatic data analysis
- Detects differences between previous scans and identifies new damage
- Uses correlation to automatically detect problem areas
- Problem areas are transmitted to ground control or to crew for further analysis

Laser Localization
- Distance measurement based on time-of-flight of a laser beam reflected on strategically disposed retroreflectors
- Space Quad is located using triangulation
- Multiple laser sensor for redundancy and stable connection
- Location calibration based on the center of ISS
- Calibration at every mission to ensure maximum precision

Autonomous Missions
The Space Quad handles custom mission planning depending on the requirements. The mission time will vary depending on the range and the data density required. Live feedback status of the drone is shown on the mission software, which ensures everything is going as scheduled during the mission. It is possible to have a manual takeover is necessary. Three autonomous controllers are installed for redundancy and high reliability.

Mission Planning
With mission planning software, it is very easy to plan the mission on the ISS, send the mission to the drone and follow the live status of the mission on the space station.

Data Transmission
Live data transmission to ISS with frequency based transmission. This technology is proven and works well in different environments. Data processing on ISS to reduce the payload size and enables to have more powerful computers do the processing than on board. It is also possible to take control more easily of the data processing. It is also easier to make software updates and to add custom functions to the image analysis software.
Safe Distance Flight
The drone will fly at 15-20 m from ISS. This is close enough for detailed images while being a safe distance for manual takeover. A distance a little further reduces missions time but reduces the quality of the data received. With high resolution sensors, a 15-20 m distance is totally acceptable and make possible to get data from damage as small as 0.5 mm in diameter.
Bibliography
https://www.nasa.gov/mission_pages/station/research/VIPR
https://www.nasa.gov/sites/default/files/files/R_Moore-ISS_Inspection_Capabilities_and_Challenges.pdf
https://www.nasa.gov/sites/default/files/files/E_Christiansen-MMODriskOverview.pdf
https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19680015493.pdf
https://www.hindawi.com/journals/aae/2014/729313/
