


Team Gecko | Design by Nature
The Challenge | Design by Nature
Geckob, MMOD damage finder robot
Geckob is a project of a mechanical prototype to inspect the surface of a spacecraft in order to detect MMOD damages using a laser which maps the outside and broadcasts data to the spacecraft. It uses an adhesive layer to stick to the surface.
The aim of this project is to design a robotic prototype, named Geckob, which must be able to inspect MMOD-impact damages on spacecrafts. Geckob is projected to move on the surface, in order to simplify his structure (he doesn’t require any propulsion system) and to find out even small imperfections. One of the main problems to face is the necessity to guarantee grip on the spacecraft: Geckob is provided with an adhesive tape, whose technology is inspired to geckos’ feet. Geckos’ ability to climb vertical walls is due to peculiar structures under the feet, which establish Van Der Waals forces with the surface. The adhesive tape is made up of microfiber arrays which reproduce the same phenomenon.
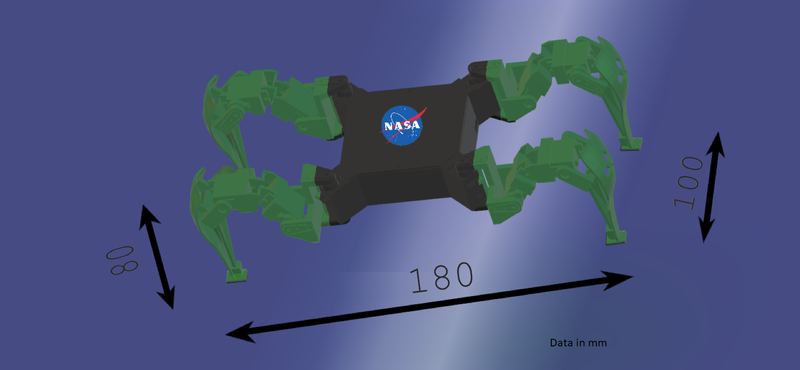
The holes due to MMOD are typically 0.1-20mm wide, so Geckob dimensions have been projected to be 180x100x80mm. He can be realized in plastic materials, so that he could be directly printed on the spacecraft and easily repaired in most of his parts.
Geckob follows a pre-established path on the surface, thanks to a 3d map of the external surface of the element to inspect. The inspection is realized through three-dimensional laser scan, which identifies differences between the original memorized model and the actual conditions of the spacecraft. When he finds any kind of difference, he stops and analyses the damage by different perspectives and takes a photo of the area: Geckob has spider-shaped legs, which allows to modify laser inclination. This is possible thanks to an Artificial Intelligence software.
Geckob is supplied with a lithium battery, since it is easy rechargeable and reliable. He is connected to the spacecraft crew, who can interact with him, if necessary. Eventually, a mechanical arm can be connected to Geckob, to fill the fractures, like bees which build their hives.
LINK TO THE PREZI PRESENTATION:https://prezi.com/aticusvjvz5p/team-gecko/
SOURCES:
https://www.nasa.gov/offices/nesc/articles/space-debris
https://www.nasa.gov/sites/default/files/files/P_Glass-Gecko_Inspired_Adhesive.pdf

SpaceApps is a NASA incubator innovation program.