


discovery | Design by Nature
The Challenge | Design by Nature
AstroBat
An autonomous free-flyer to inspect a spacecraft for damage from Micro-Meteoroid and Orbital Debris (MMOD).
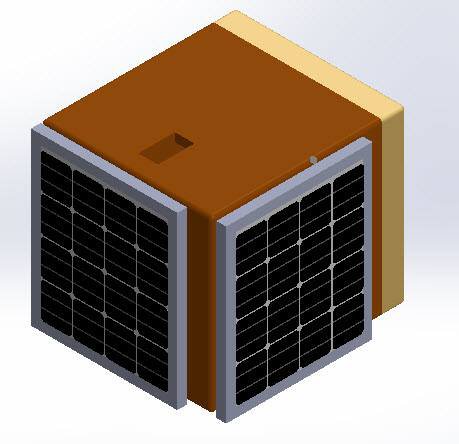
The presence of micro-teroids and orbital debris in the space can damage the space engin. The damage can be classified according to their degree of danger.Our challenge is to design an autonomous free-flyer to inspect such a spacecraft and detect these alterations.
NASA has designed a system of robotic arms attached to the space shuttle. Equipped with 3D sensors, they are likely to monitor the outer surface of the shuttle. However these arms are handled remotely by astronauts, moreover they are no longer effective for a distance of travel, from a command point of view.
The idea is to create a mobile form completely detached from the space shuttle. On the other hand the free flyer must follow the shuttle and inspect it to determine the damage. At this level we will face the following constraints:
How can the FREE FLYER determine the damage caused by MMODs?
How can he keep a relatively fixed distance from the shuttle by gravitating around it?
What is the mechanism to admit to do?
In order to inspect the shuttle, we chose to fix a camera sensor at the level of the flyer. The camera must be able to move to keep the same viewing angle of the different on each side of the shuttle.
Currently the Machine Learning is the most advanced technology in terms of possibility of having an error. According to a study made by Dr.Jeffrey de Deijn in March 2018, the percentage of errors in Machine Learning results decreased from 28.19% in 2010 to 2.25% in 2017.
How can he keep a relatively fixed distance from the shuttle by gravitating around it?
To capture the maximum image without getting lost or away from the shuttle, the flyer must be positioned at a relatively fixed altitude around the shuttle. For these reasons we decided to install a series of 3 or 4 cameras (depending on the viewing angle of the cameras) aligned in a circular manner at an angle of 360 °.
To calculate the distance between the flyer and the shuttle we will choose to work with the open CV graphics library via a python program.

SpaceApps is a NASA incubator innovation program.